
















Grip Style Grip Style | Show |
|---|
|
Overall Diameter Overall Diameter |
|---|
Diameter Diameter |
|---|
Component Component |
|---|
 | Gripper |
Jaw Return Mechanism Jaw Return Mechanism |
|---|
|
External Gripping Force External Gripping Force |
|---|
Application Application |
|---|
|
Maximum Gripping Capacity Maximum Gripping Capacity |
|---|
|
Weight Weight |
|---|
|
Maximum Holding Length Maximum Holding Length |
|---|
|
|
Internal Gripping Force Internal Gripping Force |
|---|
|
Seal Material Seal Material |
|---|
|
Maximum Temperature Maximum Temperature |
|---|
|
Housing Material Housing Material |
|---|
|
DFARS (Defense Acquisition Regulations Supplement) DFARS (Defense AcquisitionRegulations Supplement) |
|---|
REACH (Registration, Evaluation, Authorization and Restriction of Chemicals) REACH (Registration,Evaluation, Authorization and Restriction of Chemicals) |
|---|
|
RoHS (Restriction of Hazardous Substances) RoHS (Restriction ofHazardous Substances) |
|---|
|
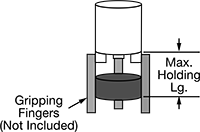
Air-Powered Grippers
Combine these grippers with your gripping fingers to lift and move items in pick-and-place applications.
Grippers with a forced-air jaw return have two air ports: one to move the jaws open and another to move them closed. The jaws grip items from the outside as well as the inside.
Circular grippers are best for a snug grip on round objects.
IP54-rated grippers are protected against dust and water splashed from all directions. They have an IP67 capable ventilation port that can be attached to a ventilation hose (connector and hose are not included), so they can become dust tight and be submerged in up to 1 meter of water for 30 minutes. All of these grippers are suitable for use in clean rooms rated to ISO Class 5.
Note: Choose a gripper with a holding force at least 10 times your item's weight.
Warning: Never use to lift people or items over people.
![]() For technical drawings and 3-D models, click on a part number.
For technical drawings and 3-D models, click on a part number.

Dia., mm | O'all | Port | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| External Gripping Force | Internal Gripping Force | Max. Gripping Cap. | Max. | Min. | Max. Holding Lg., mm | Wt. | Lg., mm | Dia., mm | Max. Pressure, psi | Pipe Size | Thread Size | Thread Type | Manufacturer (Series/Model No.) | Each | |
Aluminum Housing | |||||||||||||||
| 3.15 lbs. @ 72.5 psi | 3.6 lbs. @ 72.5 psi | 0.24 lbs./ 0.1 kg | 14 | 10 | 29 | 0.14 lbs./ 0.06 kg | 35 | 30 | 85 | __ | M3 × 0.5 | Metric | SMC (MHS3 16) | 0000000 | 0000000 |
| 5.62 lbs. @ 72.5 psi | 6.29 lbs. @ 72.5 psi | 0.43 lbs./ 0.19 kg | 16 | 12 | 35 | 0.23 lbs./ 0.1 kg | 38 | 36 | 85 | __ | M5 × 0.8 | Metric | SMC (MHS3 20) | 0000000 | 000000 |
| 9.44 lbs. @ 72.5 psi | 10.57 lbs. @ 72.5 psi | 0.72 lbs./ 0.32 kg | 20 | 14 | 39 | 0.31 lbs./ 0.14 kg | 40 | 42 | 85 | __ | M5 × 0.8 | Metric | SMC (MHS3 25) | 0000000 | 000000 |
| 57 lbs. @ 85 psi | 60 lbs. @ 85 psi | 2.75 lbs./ 1.25 kg | 21 | 16 | 50 | 0.26 lbs./ 0.12 kg | 27 | 56 | 115 | __ | M3 × 0.5 | Metric | Schunk (JGZ 40) | 0000000 | 000000 |
| 73 lbs. @ 85 psi | 79 lbs. @ 85 psi | 3.52 lbs./ 1.6 kg | 28 | 20 | 64 | 0.55 lbs./ 0.25 kg | 34 | 72 | 115 | __ | M5 × 0.8 | Metric | Schunk (JGZ 50) | 0000000 | 000000 |
| 130 lbs. @ 85 psi | 140 lbs. @ 85 psi | 6.39 lbs./ 2.9 kg | 32 | 20 | 80 | 0.94 lbs./ 0.43 kg | 43 | 87 | 115 | __ | M5 × 0.8 | Metric | Schunk (JGZ 64) | 0000000 | 000000 |
| 220 lbs. @ 85 psi | 240 lbs. @ 85 psi | 11.02 lbs./ 5 kg | 42 | 26 | 100 | 1.74 lbs./ 0.79 kg | 49 | 111 | 115 | __ | M5 × 0.8 | Metric | Schunk (JGZ 80) | 0000000 | 000000 |
| 400 lbs. @ 85 psi | 430 lbs. @ 85 psi | 19.84 lbs./ 9 kg | 52 | 32 | 125 | 3.1 lbs./ 1.41 kg | 59 | 135 | 115 | 1/8 | __ | BSPP | Schunk (JGZ 100) | 0000000 | 000000 |
| 690 lbs. @ 85 psi | 740 lbs. @ 85 psi | 34.17 lbs./ 15.5 kg | 66 | 40 | 160 | 6.1 lbs./ 2.8 kg | 67 | 166 | 115 | 1/8 | __ | BSPP | Schunk (JGZ 125) | 0000000 | 00000000 |
| 1,340 lbs. @ 85 psi | 1,430 lbs. @ 85 psi | 66.13 lbs./ 30 kg | 82 | 50 | 200 | 12.3 lbs./ 5.6 kg | 81 | 212 | 115 | 1/8 | __ | BSPP | Schunk (JGZ 160) | 0000000 | 00000000 |
Aluminum Housing—IP54-Rated, ISO Class 5 | |||||||||||||||
| 51 lbs. @ 85 psi | 56 lbs. @ 85 psi | 2.53 lbs./ 1.15 kg | 68 | 63 | 40 | 0.44 lbs./ 0.2 kg | 34 | 68 | 115 | __ | M3 × 0.5 | Metric | Schunk (DPZ+ 40) | 0000000 | 00000000 |
| 65 lbs. @ 85 psi | 71 lbs. @ 85 psi | 3.19 lbs./ 1.45 kg | 89 | 81 | 50 | 0.81 lbs./ 0.37 kg | 40 | 89 | 115 | __ | M5 × 0.8 | Metric | Schunk (DPZ+ 50) | 0000000 | 00000000 |
| 115 lbs. @ 85 psi | 135 lbs. @ 85 psi | 5.73 lbs./ 2.6 kg | 106 | 94 | 64 | 1.36 lbs./ 0.62 kg | 49 | 106 | 115 | __ | M5 × 0.8 | Metric | Schunk (DPZ+ 64) | 0000000 | 00000000 |
| 200 lbs. @ 85 psi | 220 lbs. @ 85 psi | 9.92 lbs./ 4.5 kg | 128 | 112 | 80 | 2.86 lbs./ 1.3 kg | 56 | 128 | 115 | __ | M5 × 0.8 | Metric | Schunk (DPZ+ 80) | 0000000 | 00000000 |
| 360 lbs. @ 85 psi | 430 lbs. @ 85 psi | 17.85 lbs./ 8.1 kg | 158 | 138 | 100 | 4.18 lbs./ 1.9 kg | 67 | 158 | 115 | 1/8 | __ | BSPP | Schunk (DPZ+ 100) | 0000000 | 00000000 |
| 660 lbs. @ 85 psi | 670 lbs. @ 85 psi | 32.4 lbs./ 14.7 kg | 198 | 172 | 125 | 7.7 lbs./ 3.5 kg | 76 | 198 | 115 | 1/8 | __ | BSPP | Schunk (DPZ+ 125) | 0000000 | 00000000 |
| 1,280 lbs. @ 85 psi | 1,320 lbs. @ 85 psi | 62.83 lbs./ 28.5 kg | 271 | 239 | 125 | 17.4 lbs./ 7.9 kg | 93 | 271 | 115 | 1/8 | __ | BSPP | Schunk (DPZ+ 160) | 0000000 | 00000000 |
| 1,510 lbs. @ 85 psi | 1,600 lbs. @ 85 psi | 73.85 lbs./ 33.5 kg | 345 | 295 | 160 | 34.3 lbs./ 15.6 kg | 111 | 345 | 115 | 1/8 | __ | BSPP | Schunk (DPZ+ 200) | 0000000 | 00000000 |
Add optional sensors to these grippers to signal when fingers are either open or closed (open and closed for sensors with two-position detection), and use that information to trigger other actions in your system. Magnetic sensors detect finger position by responding to magnets placed on the piston of air-powered grippers or the motor of electric-powered grippers. Sensors with a plug connection work with the input/output on robot tool mounts with a power/signal block. Sensors with a hardwire connection have wire leads you either wire to a plug or hardwire to a power source. PNP sensors communicate proximity with a positive signal, while NPN sensors send a negative signal.
| For Manufacturer (Series) | Signal Output Type | No. of Sensing Positions | Plug Type | No. of Wire Leads | Current, mA | Voltage | Switch Starting Position | Each | |
Magnetic with Plug Connection | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Schunk (DPG+, DPZ+, DRG, JGP, JGP-P, JGZ, KGG, MPG+, PGN+E) | NPN | 1 | 3-Pin M8 | __ | 50 | 24V DC | 1 Off (Normally Open) | 00000000 | 0000000 |
| Schunk (DPG+, DPZ+, DRG, JGP, JGP-P, JGZ, KGG, MPG+, PGN+E) | PNP | 1 | 3-Pin M8 | __ | 50 | 24V DC | 1 Off (Normally Open) | 0000000 | 000000 |
| Schunk (DPG+, DPZ+, DRG, JGP, JGP-P, JGZ, KGG, MPG+, PGN+E) | PNP | 2 | 4-Pin M8 | __ | 100 | 24V DC | 1 Off (Normally Open) and 1 On (Normally Closed) | 00000000 | 000000 |
Magnetic with Hardwire Connection | |||||||||
| Schunk (DPG+, DPZ+, DRG, JGP, JGP-P, JGZ, KGG, MPG+, PGN+E) | NPN | 1 | __ | 3 | 50 | 24V DC | 1 Off (Normally Open) | 00000000 | 000000 |
| Schunk (DPG+, DPZ+, DRG, JGP, JGP-P, JGZ, KGG, MPG+, PGN+E) | PNP | 1 | __ | 3 | 50 | 24V DC | 1 Off (Normally Open) | 00000000 | 000000 |
| Schunk (DPG+, DPZ+, DRG, JGP, JGP-P, JGZ, KGG, MPG+, PGN+E) | PNP | 2 | __ | 4 | 100 | 24V DC | 1 Off (Normally Open) and 1 On (Normally Closed) | 00000000 | 000000 |

Finger blanks come ready to mount, so you can make custom fingers without starting from scratch. Just machine the blank’s gripping end to create fingers that will securely grip your specific parts.
When used in pairs, individual blanks have a symmetrical design that’s suitable for most applications.
Aluminum blanks are lightweight and resist rusting in wet environments. They’re softer than steel blanks, making them easier to machine and less likely to scratch your parts.
Steel blanks are stronger and more durable than aluminum blanks, so they’re less likely to break if they hit a nearby object. You can harden them for even more strength and durability.
For Gripper Jaw | Overall | |||||||
|---|---|---|---|---|---|---|---|---|
| For Manufacturer (Series/Model No.) | Wd., mm | Dp., mm | Lg., mm | Wd., mm | Dp., mm | Mounting Hardware Included | Each | |
Aluminum | ||||||||
| Schunk (JGP, JGP-P, JGZ, PGN+, PGN+E, PGN+P, PZN+ 64) | 21 | 12.5 | 64 | 32 | 22 | Yes | 00000000 | 000000 |
| Schunk (JGP, JGP-P, JGZ, PGN+, PGN+E, PGN+P, PZN+ 80) | 26 | 15 | 80 | 41 | 22 | Yes | 00000000 | 00000 |
| Schunk (JGP, JGP-P, JGZ, PGN+, PGN+E, PGN+P, PZN+ 100) | 33 | 18.5 | 100 | 52 | 30 | Yes | 00000000 | 000000 |
Steel | ||||||||
| Schunk (JGP, JGP-P, JGZ, PGN+, PGN+E, PGN+P, PZN+ 64) | 21 | 12.5 | 64 | 32 | 22 | Yes | 00000000 | 00000 |
| Schunk (JGP, JGP-P, JGZ, PGN+, PGN+E, PGN+P, PZN+ 80) | 26 | 15 | 80 | 41 | 22 | Yes | 00000000 | 000000 |
| Schunk (JGP, JGP-P, JGZ, PGN+, PGN+E, PGN+P, PZN+ 100) | 33 | 18.5 | 100 | 52 | 30 | Yes | 00000000 | 000000 |
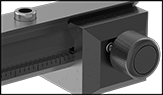
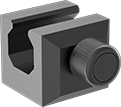
 |  Adjustable Finger Mount |
 Scale |
Attach adjustable finger mounts to your Schunk grippers, so they can handle a wider range of part sizes and shapes. Each mount has a positioning slide that moves along a rail, which has a scale for making adjustments. Connect your fingers to the slides, position them on the rail, and tighten the knob to secure them in place. Use one mount for as many fingers as your gripper will hold.
Gripper | Finger | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| For Manufacturer (Series/Model No.) | Manufacturer (Series/Model No.) | Rail Lg., mm | Travel Lg., mm | Carriage Wd., mm | O'all Ht., mm | Adjustment Increments (Lg.), mm | Bolt Hole Thread Size | No. of Bolt Holes | Bolt Hole Thread Size | No. of Bolt Holes | Mounting Fasteners Included | Each | |
Anodized Aluminum | |||||||||||||
With Nonremovable Positioning Slides | |||||||||||||
| Schunk (JGP, JGP-P, JGZ, PGN+, PGN+E, PGN+P, PZN+ 64) | Schunk (UZB 64) | 63.5 | 33 | 36 | 36 | 2 | M4 × 0.7 mm | 2 | M4 × 0.7 mm | 2 | No | 00000000 | 0000000 |
With Removable Positioning Slides | |||||||||||||
| Schunk (JGP, JGP-P, JGZ, PGN+, PGN+E, PGN+P, PZN+ 125) | Schunk (UZB 125) | 112.75 | 72 | 52 | 49 | 3 | M6 × 1 mm | 2 | M6 × 1 mm | 2 | No | 00000000 | 000000 |
| Schunk (JGP, JGP-P, JGZ, PGN+, PGN+E, PGN+P, PZN+ 80) | Schunk (UZB 80) | 79 | 44 | 42 | 39.5 | 2 | M5 × 0.8 mm | 2 | M5 × 0.8 mm | 2 | No | 00000000 | 000000 |
| Schunk (JGP, JGP-P, JGZ, PGN+, PGN+E, PGN+P, PZN+ 100) | Schunk (UZB 100) | 96.5 | 55 | 47 | 45.5 | 3 | M6 × 1 mm | 2 | M6 × 1 mm | 2 | No | 00000000 | 000000 |
Removable positioning slides are part of the adjustable finger mounts. Add additional slides for tasks that require frequent finger changes. Having slides on hand with fingers already attached, makes it quick and easy to retool your gripper.
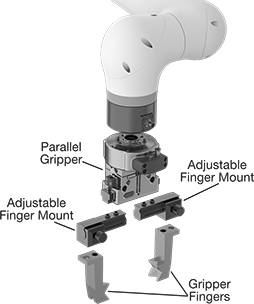
Robot-Ready Configurable Grippers
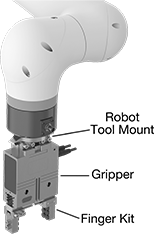
Build a complete robot gripping tool using these grippers, fingers, and robot tool mounts. They’re quick to assemble, so you can test and iterate rapidly to improve their productivity and reliability. Reconfiguring them for a new job won’t take long either.
![]() For technical drawings and 3-D models, click on a part number.
For technical drawings and 3-D models, click on a part number.
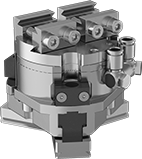
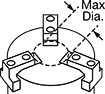
Make fingers open and close with equal force in order to grasp and release parts from the inside or out. Grippers with a higher stroke width support a wider grip. Connect them to robot tool mounts using gripper configuration kits.
Air-powered grippers run on compressed air. Circular grippers hold small cylindrical parts more snugly and centered than parallel grippers. However, they can’t hold cube-shaped parts.
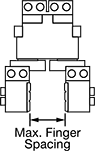
O'all, mm | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| External / Internal Gripping Force | Max. Gripping Cap. | Grip Opening / Closing Time | Cycles per Second | Stroke Wd., mm | Max. Finger Spacing, mm | Wt. | Dia. | Housing Material | Manufacturer (Series) | Each | |
Air-Powered | |||||||||||
Circular with Forced Air Jaw Return—Steel Jaws | |||||||||||
| 130 lbs. @ 87 psi / 140 lbs. @ 87 psi | 6.3 lbs. / 2.9 kg | 30 ms / 30 ms | 13 | 12 | 56 | 1.40 lbs. / 0.60 kg | 97 | Anodized Aluminum | Schunk (JGZ) | 00000000 | 000000000 |
| 220 lbs. @ 87 psi / 240 lbs. @ 87 psi | 11 lbs. / 5 kg | 50 ms / 50 ms | 8 | 16 | 70 | 2.50 lbs. / 1.10 kg | 124 | Anodized Aluminum | Schunk (JGZ) | 0000000 | 00000000 |
| 400 lbs. @ 87 psi / 430 lbs. @ 87 psi | 19.8 lbs. / 9 kg | 100 ms / 100 ms | 4 | 20 | 90 | 4.20 lbs. / 1.90 kg | 157 | Anodized Aluminum | Schunk (JGZ) | 00000000 | 00000000 |
Signal when fingers are either open or closed, and use that information to trigger other actions in your system.
Magnetic sensors detect finger position by responding to magnets placed on the piston of air-powered grippers or the motor of electric-powered grippers. Sensors with programmable two-position detection send a signal when fingers open and close, letting you trigger actions in your system based on both signals.
Sensors with a plug connection work with the input/output on robot tool mounts with a power/signal block. Sensors with a hardwire connection have wire leads you either wire to a plug or hardwire to a power source.
PNP sensors communicate proximity with a positive signal, while NPN send a negative signal.
Sensors | Sensor Cord Splitters | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Signal Output Type | No. of Sensing Positions | Plug Type | No. of Wire Leads | Current, mA | Voltage | Switch Starting Position | For Manufacturer (Series) | Each | Each | ||
Magnetic with Plug Connection | |||||||||||
| NPN | 1 | 3-Pin M8 | __ | 50 | 24V DC | 1 Off (Normally Open) | Schunk (DPG+, DPZ+, DRG, JGP, JGP-P, JGZ, KGG, MPG+, PGN+E) | 00000000 | 0000000 | 000000 | 00 |
| PNP | 1 | 3-Pin M8 | __ | 50 | 24V DC | 1 Off (Normally Open) | Schunk (DPG+, DPZ+, DRG, JGP, JGP-P, JGZ, KGG, MPG+, PGN+E) | 0000000 | 000000 | 000000 | 00 |
| PNP | 2 | 4-Pin M8 | __ | 100 | 24V DC | 1 Off (Normally Open) and 1 On (Normally Closed) | Schunk (DPG+, DPZ+, DRG, JGP, JGP-P, JGZ, KGG, MPG+, PGN+E) | 00000000 | 000000 | 0000000 | 000000 |
Magnetic with Hardwire Connection | |||||||||||
| NPN | 1 | __ | 3 | 50 | 24V DC | 1 Off (Normally Open) | Schunk (DPG+, DPZ+, DRG, JGP, JGP-P, JGZ, KGG, MPG+, PGN+E) | 00000000 | 000000 | 000000 | 00 |
| PNP | 1 | __ | 3 | 50 | 24V DC | 1 Off (Normally Open) | Schunk (DPG+, DPZ+, DRG, JGP, JGP-P, JGZ, KGG, MPG+, PGN+E) | 00000000 | 000000 | 000000 | 00 |
| PNP | 2 | __ | 4 | 100 | 24V DC | 1 Off (Normally Open) and 1 On (Normally Closed) | Schunk (DPG+, DPZ+, DRG, JGP, JGP-P, JGZ, KGG, MPG+, PGN+E) | 00000000 | 000000 | 000000 | 00 |