


























Filter by
System of Measurement
Voltage
Speed @ Continuous Operating Torque

Maximum Rotation Speed
Starting Torque
Power
Continuous Operating Torque
Motor Type

Direction of Operation


Wire Connection
Full Load Current
Mounting Position
Power Source
Voltage Type
Export Control Classification Number (ECCN)
DFARS Specialty Metals

About Electric Motors
Select a new motor using the information on the nameplate, including voltage, size, and enclosure type.
Compact DC Motors
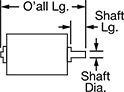
Round-Face Motors
 |
 |
 |
Round-face motors have a solid shaft (no keyway).
Overall | Shaft | Insulation | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Speed @ Continuous Operating Torque, rpm | Full Load Current | Motor Enclosure Type | Lg. | Wd. | Ht. | Dia. | Lg. | Ctr. to Base | Class | Max. Temp., ° F | Each | |||
12V DC | ||||||||||||||
| 3,000 | 4.9 amp | Totally Enclosed Nonventilated (TENV) | 4 3/4" | 2 1/8" | 2 3/4" | 1/4" | 1" | 1.06" | F | 311 | 6331K13 | 0000000 | ||
| 5,102 | 2 amp | Totally Enclosed Nonventilated (TENV) | 2 3/4" | 1 1/2" | 1 1/2" | 0.156" | 0.562" | 0.79" | F | 311 | 6331K12 | 000000 | ||
| 5,243 | 2.6 amp | Totally Enclosed Nonventilated (TENV) | 3" | 1 1/2" | 1 1/2" | 0.156" | 0.562" | 0.79" | F | 311 | 6331K62 | 000000 | ||
| 6,172 | 1 amp | Totally Enclosed Nonventilated (TENV) | 2 1/2" | 1 1/4" | 1 1/4" | 0.156" | 0.562" | 0.59" | F | 311 | 6331K11 | 000000 | ||
| 7,060 | 0.7 amp | Totally Enclosed Nonventilated (TENV) | 1 1/2" | 7/8" | 1 1/2" | 0.079" | 0.256" | 0.433" | B | 266 | 6331K85 | 000000 | ||
| 8,574 | 1.9 amp | Totally Enclosed Nonventilated (TENV) | 3" | 1 1/4" | 1 1/4" | 0.156" | 0.562" | 0.59" | F | 311 | 6331K59 | 000000 | ||
| 12,000 | 0.6 amp | Totally Enclosed Nonventilated (TENV) | 2" | 5/8" | 7/8" | 0.059" | 0.24" | 0.315" | A | 221 | 6331K84 | 000000 | ||
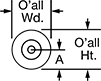
Round-Face Motors with Mounting Threads
 |
|
|
Round-face motors have a solid shaft (no keyway).
Overall | Shaft | Insulation | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Speed @ Continuous Operating Torque, rpm | Full Load Current | Motor Enclosure Type | Lg. | Wd. | Ht. | Dia. | Lg. | Ctr. to Base | Class | Max. Temp., ° F | Each | |||
12V DC | ||||||||||||||
| 5,410 | 0.1 amp | Totally Enclosed Nonventilated (TENV) | 1" | 5/16" | 5/16" | 0.031" | 0.217" | 0.157" | A | 221 | 6331K81 | 0000000 | ||
| 6,510 | 0.2 amp | Totally Enclosed Nonventilated (TENV) | 1 3/8" | 3/8" | 3/8" | 0.039" | 0.22" | 0.197" | A | 221 | 6331K82 | 000000 | ||
Compact DC Gearmotors
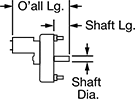
Square Face
 |
 |
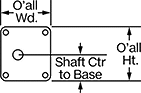 |
Overall | Shaft | Insulation | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Speed @ Continuous Operating Torque | Power, hp | Full Load Current, amp | Lg. | Wd. | Ht. | Bearing Type | Dia. | Lg. | Ctr.-to-Base Lg. | Class | Max. Temp., ° F | Each | |||
12V DC | |||||||||||||||
| 0.6 rpm @ 800 in·ozf | 0.0003 | 0.1 | 3 1/4" | 2 3/4" | 3" | Plain | 5/16" | 1" | 1.43" | B | 266 | 6409K11 | 000000 | ||
| 1.2 rpm @ 800 in·ozf | 0.001 | 0.5 | 3 1/2" | 2 3/4" | 3" | Plain | 5/16" | 1" | 1.43" | B | 266 | 6409K12 | 00000 | ||
| 3 rpm @ 640 in·ozf | 0.0025 | 0.7 | 3 1/4" | 2 3/4" | 3" | Plain | 5/16" | 1" | 1.43" | B | 266 | 6409K13 | 00000 | ||
| 7 rpm @ 640 in·ozf | 0.005 | 0.7 | 4" | 2 3/4" | 3" | Plain | 5/16" | 1" | 1.43" | B | 266 | 6409K14 | 00000 | ||
| 12 rpm @ 640 in·ozf | 0.0077 | 1.3 | 3 1/2" | 2 3/4" | 3" | Plain | 5/16" | 1" | 1.43" | B | 266 | 6409K15 | 00000 | ||
| 15 rpm @ 400 in·ozf | 0.0067 | 1.4 | 3 1/2" | 2 3/4" | 3" | Plain | 5/16" | 1" | 1.43" | B | 266 | 6409K16 | 00000 | ||
| 26 rpm @ 320 in·ozf | 0.008 | 1.3 | 3 1/2" | 2 3/4" | 3" | Plain | 5/16" | 1" | 1.43" | B | 266 | 6409K17 | 00000 | ||
| 47 rpm @ 160 in·ozf | 0.008 | 1.2 | 3 1/2" | 2 3/4" | 3" | Plain | 5/16" | 1" | 2.08" | B | 266 | 6409K18 | 00000 | ||
Rectangular Face
 | 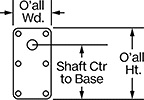 | 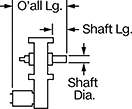 |
Overall | Shaft | Insulation | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Speed @ Continuous Operating Torque | Power, hp | Full Load Current, amp | Lg. | Wd. | Ht. | Bearing Type | Dia. | Lg. | Ctr.-to-Base Lg. | Class | Max. Temp., ° F | Each | |||
12V DC | |||||||||||||||
| 0.4 rpm @ 2,400 in·ozf | 0.002 | 0.3 | 3 3/4" | 2 3/4" | 4 5/8" | Plain | 1/2" | 7/8" | 1.38" | B | 266 | 6409K106 | 0000000 | ||
| 4 rpm @ 1,920 in·ozf | 0.01 | 1.4 | 5" | 2 3/4" | 4 5/8" | Plain | 1/2" | 7/8" | 1.38" | B | 266 | 6409K107 | 000000 | ||
| 9 rpm @ 1,600 in·ozf | 0.02 | 2.6 | 5" | 2 3/4" | 4 5/8" | Plain | 1/2" | 7/8" | 1.38" | B | 266 | 6409K108 | 000000 | ||
| 18 rpm @ 880 in·ozf | 0.02 | 2.4 | 4 3/4" | 2 3/4" | 4 5/8" | Plain | 1/2" | 1 1/8" | 1.38" | B | 266 | 6409K109 | 000000 | ||
| 24 rpm @ 688 in·ozf | 0.02 | 2.8 | 4 1/2" | 2 3/4" | 4 5/8" | Plain | 1/2" | 7/8" | 1.38" | B | 266 | 6409K111 | 000000 | ||
Round Face
 | 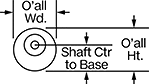 |  |
Overall | Shaft | Insulation | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Speed @ Continuous Operating Torque | Power, hp | Full Load Current, amp | Lg. | Wd. | Ht. | Bearing Type | Dia. | Lg. | Ctr.-to-Base Lg. | Class | Max. Temp., ° F | Each | |||
12V DC | |||||||||||||||
| 1 rpm @ 175 in·ozf | 0.0001 | 0.2 | 4 1/4" | 2" | 2" | Plain | 1/4" | 3/4" | 1.33" | F | 311 | 6331K35 | 0000000 | ||
| 2 rpm @ 175 in·ozf | 0.0004 | 0.4 | 4 1/4" | 2" | 2" | Plain | 1/4" | 3/4" | 1.33" | F | 311 | 6331K34 | 000000 | ||
| 7 rpm @ 140 in·ozf | 0.001 | 0.7 | 4 1/4" | 2" | 2" | Plain | 1/4" | 3/4" | 1.33" | F | 311 | 6331K33 | 000000 | ||
| 25 rpm @ 47 in·ozf | 0.001 | 0.7 | 4 1/4" | 2" | 2" | Plain | 1/4" | 3/4" | 1.33" | F | 311 | 6331K32 | 000000 | ||
| 83 rpm @ 16 in·ozf | 0.0012 | 0.7 | 4 1/4" | 2" | 2" | Plain | 1/4" | 3/4" | 1.33" | F | 311 | 6331K31 | 000000 | ||
| 161 rpm @ 374 in·ozf | 0.0714 | 6.4 | 6 1/4" | 2 1/8" | 2 3/4" | Ball | 1/4" | 3/4" | 1" | F | 311 | 2709K17 | 000000 | ||
| 536 rpm @ 124 in·ozf | 0.0769 | 6.4 | 6 1/4" | 2 1/8" | 2 3/4" | Ball | 1/4" | 3/4" | 1" | F | 311 | 2709K15 | 000000 | ||
