Filter by
Shaft Length
Maximum Holding Torque
Voltage
Mounting Position
Overall Width
Component
Maximum Rotation Speed
Wire Connection


Overall Height
Direction of Operation


Export Control Classification Number (ECCN)
DFARS Specialty Metals
U.S.–Mexico–Canada Agreement (USMCA) Qualifying
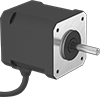
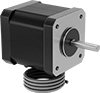
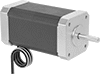
Stepper Motors

Other Products