



















Robot-Ready Air-Powered Grippers

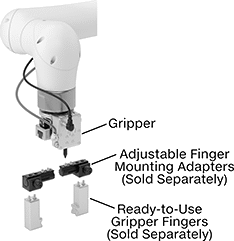
Powered by compressed air, these grippers pick and place parts for machine-tending, packaging, and assembly tasks. They come with everything you need to connect to your robot, and built-in air control valves eliminate the need for complicated external systems. Just connect the included tubing to your air supply and control everything through your robot’s software. These grippers pick up parts from the inside or outside—for example, pick up a hollow part from the inside or a solid part from the outside. They also have a built-in blow-off nozzle that clears debris before pickup.
These grippers come with a robot mount, electrical connections, and software plug-ins tailored to FANUC CRX, Universal Robot (UR), and ABB arms. Add fingers and they’re ready to grip. Ready-to-use fingers are sold separately.
Unlike collaborative robot-ready grippers, these grippers operate at high forces. They may require additional safety precautions if you’re working near your collaborative robot.


These grippers come with a long electrical cord with wire leads that connect to terminals on your robot controller. Use the software plug-in to control these grippers from your teach pendant. Then you can use your teach pendant to open and close the grippers and toggle the air blow-off nozzle on or off.
The IP67-rated control box of these grippers shields the electrical components from coolant. Plus, their jaws are rated IP40, so solid objects, such as chips produced during machining, won’t obstruct their motion.
Choose a single gripper for simple pick-and-place operations. It holds one part at a time.
Dual grippers can help reduce cycle times by handling two parts at once. For example, you might use one gripper to unload a part from your machine, then rotate the robot arm and use the second gripper to load a new part.
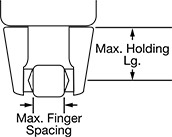
Stroke width is the total distance the gripper fingers move when opened or closed.
O'all | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| For Robot Arm Manufacturer (Series/Model No.) | Max. Gripping Cap. | External Gripping Force | Internal Gripping Force | Stroke Wd., mm | Max. Cycles per Sec. | Max. Finger Spacing, mm | Max. Holding Lg., mm | Wt. | Lg., mm | Wd., mm | Dp., mm | Max. Pressure, psi | Each | |
Single Gripper | ||||||||||||||
| FANUC (CRX 5iA, 10iA, 10iA/L, 20iA, 25iA, 30iA) Universal Robots (UR3e; UR5e; UR10e; UR16e) ABB (CRB 15000 10/1.52) | 6.06 lbs. / 2.75 kg | 123 lbs. @ 87 psi | 137 lbs. @ 87 psi | 16 | 14 | 43 | 110 | 2.18 lbs. / 0.99 kg | 116 | 99 | 100 | 100 | 9486N26 | 000000000 |
| FANUC (CRX 5iA, 10iA, 10iA/L, 20iA, 25iA, 30iA) Universal Robots (UR3e; UR5e; UR10e; UR16e) ABB (CRB 15000 10/1.52) | 9.59 lbs. / 4.35 kg | 195 lbs. @ 87 psi | 209 lbs. @ 87 psi | 20 | 11 | 55 | 145 | 3.04 lbs. / 1.38 kg | 116 | 120 | 104 | 100 | 9486N27 | 00000000 |
Dual Gripper | ||||||||||||||
| FANUC (CRX 5iA, 10iA, 10iA/L, 20iA, 25iA, 30iA) Universal Robots (UR3e; UR5e; UR10e; UR16e) ABB (CRB 15000 10/1.52) | 3.85 lbs. / 1.75 kg | 78 lbs. @ 87 psi | 84 lbs. @ 87 psi | 12 | 20 | 32.5 | 90 | 3.57 lbs. / 1.62 kg | 125 | 177 | 95 | 100 | 9486N28 | 00000000 |
| FANUC (CRX 5iA, 10iA, 10iA/L, 20iA, 25iA, 30iA) Universal Robots (UR3e; UR5e; UR10e; UR16e) ABB (CRB 15000 10/1.52) | 6.06 lbs. / 2.75 kg | 123 lbs. @ 87 psi | 137 lbs. @ 87 psi | 16 | 14 | 43 | 110 | 4.63 lbs. / 2.1 kg | 125 | 205 | 95 | 100 | 9486N29 | 00000000 |
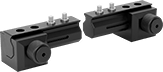
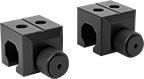
These adapters allow your gripper to handle a wider range of part sizes. You can also quickly adjust finger placement for different jobs. Each pair of adapters includes a jaw mount and a positioning slide for each jaw of your gripper. The jaw mounts slide into the gripper’s jaw and your fingers attach to the positioning slides. Scales on the jaw mounts let you precisely place the positioning slides. Once in place, tighten the thumb screws to secure them.

No need to machine your own gripper fingers. Choose these fingers to pick up parts with basic shapes, such as those with flat or simple curved edges.