


















Air-Powered Grippers
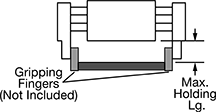
Combine these grippers with your gripping fingers to lift and move items in pick-and-place applications.
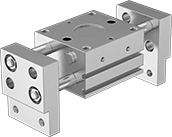
Parallel grippers handle most shapes, including square, circular, and angled objects. Grippers with a forced-air jaw return have two air ports: one to move the jaws open and another to move them closed. The jaws grip items from the outside as well as the inside.
Note: Choose a gripper with a holding force at least 10 times your item's weight.
Warning: Never use to lift people or items over people.
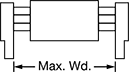
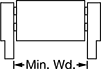
Wd., mm | O'all | Port | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| External Gripping Force | Internal Gripping Force | Max. Gripping Cap. | Max. | Min. | Max. Holding Lg., mm | Wt. | Lg., mm | Wd., mm | Dp., mm | Max. Pressure, psi | Pipe Size | Thread Type | Manufacturer (Series/Model No.) | Each | |
Aluminum Housing | |||||||||||||||
| 395 lbs. @ 85 psi | 395 lbs. @ 85 psi | 19.4 lbs./ 8.8 kg | 362 | 228 | 300 | 17.7 lbs./ 8 kg | 92 | 424 | 119 | 115 | 1/8 | BSPP | Schunk (PSH 52) | 7067N37 | 000000000 |
Add optional sensors to your gripper to signal when fingers are either open or closed (open and closed for sensors with two-position detection), and use that information to trigger other actions in your system. Since they’re magnetic, they detect the finger position using magnets placed on the piston.
Sensors with a plug connection work with the input/output on robot tool mounts with a power/signal block. NPN sensors communicate proximity with a negative signal, while PNP sensors send a positive signal.
| For Manufacturer (Series) | Signal Output Type | No. of Sensing Positions | Plug Type | Current, mA | Voltage | Switch Starting Position | Each | |
Magnetic with Plug Connection | ||||||||
|---|---|---|---|---|---|---|---|---|
| Schunk (PSH) | PNP | 1 | 3-Pole M8 | 200 | 24V DC | 1 Off (Normally Open) | 7067N55 | 000000 |