


























Filter by
For Robot Arm Manufacturer


Manufacturer Model Number
Connection Location
Weight
Component
Cup Material
U.S.–Mexico–Canada Agreement (USMCA) Qualifying
Export Control Classification Number (ECCN)
DFARS Specialty Metals

Performance
Robot-Ready Electric Vacuum Lifters for Lightweight Items
 |
Made for FANUC CRX and Universal Robots collaborative robots, these lifters use suction to pick up and move lightweight items, up to 6 lbs. They run on electricity, so you don’t need compressed air or air valves. Often used in packaging, palletizing, and material handling, these lifters can grip everything from small cardboard boxes to bagged screws. With soft rubber cups, they’re less likely than pick-and-place grippers to damage glass, thin plastic, and other delicate materials. They’re also simple to set up—a single cord supplies both power and control to your robot arm. They help you meet ISO/TS 15066 international safety standards for people working near robots because there are no pinch points or sharp edges.
Vacuum Lifters
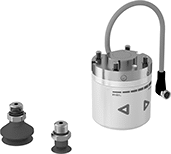 |
These lifters include a vacuum generator with a robot mount, a cord, and two types of vacuum cups. Use the flat cup for items with level surfaces and the single-bellows cup for gripping tilted items or items of different heights. You can also use your own vacuum cup if it has a compatible 1/4 BSPP threaded connection. For large items, items that might break if lifted from a single point, or material with uneven weight distribution, use 2-, 3-, or 4-cup assemblies (sold separately).
Once you’ve installed these lifters, use your robot program to turn suction on or off. An integrated vacuum switch tells your robot when an item is picked up, so it knows when to move to the next location. Adjust the vacuum level using the arrow keys on the lifter body. These lifters achieve maximum weight capacity only when handling items with smooth, nonporous surfaces, such as glass or sheet metal.
Lifters for FANUC CRX arms are FANUC approved and lifters for Universal Robots (UR) arms are UR+ certified, so they’ve been tested to work seamlessly with your robot. For simple integration with your teach pendant software, download FANUC and URCap plug-ins from the manufacturer’s website.
Overall, mm | Flat Cup, mm | Single-Bellows Cup, mm | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
For Robot Arm Mfr. (Series/Model No.) | Max. Wt. Cap., lb. | Dia. | Ht. | Cup Configuration | Mounting Fasteners Included | Dia. | Ht. | Dia. | Ht. | Each | |||
Schmalz ECBPMi Series | |||||||||||||
| FANUC (CRX/5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) | 6 | 63 | 112.4 | 1 Cup | Yes | 20 | 12.8 | 32 | 23 | 7110N26 | 000000000 | ||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR7e, UR10e, UR16e) | 6 | 63 | 112.4 | 1 Cup | Yes | 20 | 12.8 | 32 | 23 | 7110N23 | 00000000 | ||
| Universal Robots (UR10, UR10e, UR12e, UR15, UR16e) | 6 | 63 | 112.4 | 1 Cup | Yes | 20 | 12.8 | 32 | 23 | 7110N24 | 00000000 | ||


Robot-Ready Electric Vacuum Lifters
 |
Attach these lifters to FANUC CRX or Universal Robots collaborative robots. They handle items up to 3.5 times heavier than our lifters for lightweight items. Because they use electricity to pick up and move items with suction, there’s no need for compressed air or air control valves. They don’t have pinch points or sharp edges, so they help you meet ISO/TS 15066 international safety standards for people working near robots.
Often used in packaging, palletizing, and material handling, these lifters can grip everything from cardboard boxes to bags of screws. With soft rubber cups, they’re less likely than pick-and-place grippers to damage glass, thin plastic, and other delicate objects. To install, plug the cord into your robot arm. It carries both power and control signals.
Vacuum Lifters
 |
These lifters include a robot tool mount, vacuum generator, quick-change cup mount, vacuum cup assembly, extra vacuum cup, and cord. Use the quick-change cup mount to swap in other vacuum cup assemblies (sold separately).
Once installed, use your robot program to turn suction on or off. An integrated vacuum switch tells your robot when an item is picked up, so it can move to the next location. View and adjust vacuum levels and other settings with an onboard screen and keypad.
Lifters for FANUC CRX arms are FANUC approved and lifters for Universal Robots (UR) arms are UR+ certified, so they’ve been tested to work seamlessly with your robot. For simple integration with your teach pendant software, download FANUC and URCap plug-ins from the manufacturer’s website.
Maximum Weight Capacity—Maximum weight capacity is achieved only when lifting items with smooth, nonporous surfaces, such as those made from glass and sheet metal. Materials like cardboard leak air when lifted, which reduces your lifter’s capacity. For instance, you can lift about 25% of the maximum capacity when using these lifters on a cardboard box similar to those we ship our parts in.
Wt. Cap., lb. | Overall, mm | Flat Cup, mm | Single-Bellows Cup, mm | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
For Robot Arm Mfr. (Series/Model No.) | Max. | Reduced | Dia. | Ht. | Mounting Fasteners Included | Cup Configuration | Dia. | Ht. | Dia. | Ht. | Each | |||
Schmalz ECBPi Series | ||||||||||||||
| FANUC (CRX/5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) | 22 | 6 | 151.5 | 188.8 | Yes | 1 Cup | 42 | 15 | 42 | 30 | 7110N25 | 000000000 | ||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR7e, UR10, UR10e, UR12e, UR15, UR16e) | 22 | 6 | 151.5 | 188.8 | Yes | 1 Cup | 42 | 15 | 42 | 30 | 7110N16 | 00000000 | ||
Robot-Ready Configurable Vacuum Lifters
 |
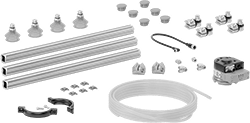 |
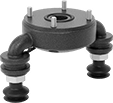
Everything you need to build a custom vacuum lifter for your collaborative robot—including rails, connecting hardware, vacuum cups, air hose, robot arm mount, and vacuum generator, also called a venturi device. Whether you’re picking and placing stamped sheet metal, molded plastic, or cardboard boxes, this system gives you the freedom to position vacuum cups where you need them. Go from concept to ready-to-lift in minutes—you’ll need only simple tools for assembly. Build a custom frame with the aluminum rails—you can cut them down to size and join them together with the included connectors. Place the vacuum cups anywhere along your frame.
Hooking these lifters up to your robot arm is simple too. Use the included mount to bolt them right to the end of your robot arm. All that’s left is to plug the power cord into your robot arm and hook the lifter up to your compressed air line.
These lifters have integrated air control valves, so you can use your robot’s control program to turn suction on or off via digital inputs and outputs. A built-in vacuum switch tells your robot when an item is picked up, so it knows to move to the next location.
For Universal Robots Robot Arms—Lifters for Universal Robots (UR) arms are UR+ certified, so they’ve been tested to work seamlessly with your robot. For simple integration with your teach pendant software, download the URCap plug-in from the manufacturer’s website.
Maximum Weight Capacity—Maximum weight capacity is achieved only when lifting items with smooth, nonporous surfaces, such as glass and sheet metal. Materials like cardboard leak air when lifted, which reduces your lifter’s capacity. For instance, you can lift about 20% of the maximum capacity when using these lifters on a cardboard box similar to those we ship our parts in.
Wt. Cap., lb. | Single-Bellows Cup, mm | Temp., ° F | Air Inlet | Lifter, mm | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
For Robot Arm Mfr. (Series/Model No.) | Max. Vacuum, in. Hg | Max. | Reduced | Dia. | Ht. | Air Consumption @ Pressure | No. of Cups | Housing Material | Min. | Max. | Includes | Bolt Circle Dia., mm | Connection Port | Thread Type | Pipe Size | Ht. | Wd. | Dp. | Each | |||
Schmalz PXT, RECBi Series | ||||||||||||||||||||||
| FANUC (CRX/5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) | 25 | 112 | 24 | 41 | 37.2 | 3.1 scfm @ 80 psi | 4 | Nylon | 32 | 100 | Air Hose Aluminum Rails Assembly Hardware Electrically Controlled Vacuum Lifter Mounting Brackets Vacuum Cups | 50 | Pipe | BSPP | 1/8 | 68 | 108 | 75 | 9381N101 | 000000000 | ||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR7e, UR10, UR10e, UR12e, UR15, UR16e) | 25 | 112 | 24 | 41 | 37.2 | 3.1 scfm @ 80 psi | 4 | Nylon | 32 | 100 | Air Hose Aluminum Rails Assembly Hardware Electrically Controlled Vacuum Lifter Mounting Brackets Vacuum Cups | 50 | Pipe | BSPP | 1/8 | 68 | 108 | 75 | 9381N102 | 00000000 | ||
Robot-Ready Large-Area Vacuum Lifters
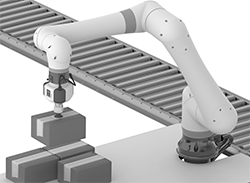
Lifters with Silicone Rubber Cups
 |  |
Shown with Robot Arm (Not Included) |
Wt. Cap., lb. | Cup | Overall, mm | Temp., ° F | Air Inlet | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
For Robot Arm Mfr. (Series/Model No.) | Max. Vacuum, in. Hg | Max. | Reduced | Air Consumption @ Pressure | No. of | Color | Dia., mm | Ht., mm | Ht. | Wd. | Housing Material | Min. | Max. | Bolt Circle Dia., mm | Connection Port | Connection | For Tube OD, mm | Gender | Each | |||
Schmalz FXCB Series | ||||||||||||||||||||||
| FANUC (CRX/5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) | 17.7 | 78 | 50 | 7.7 scfm @ 80 psi | 15 | Green | 43.5 | 47 | 164 | 331 | Polyurethane Rubber | 45 | 100 | 50 | Tube | Push to Connect | 10 | Female | 5096N11 | 000000000 | ||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR7e, UR10, UR10e, UR12e, UR15, UR16e) | 17.7 | 78 | 50 | 7.7 scfm @ 80 psi | 15 | Green | 43.5 | 47 | 164 | 331 | Polyurethane Rubber | 45 | 100 | 50 | Tube | Push to Connect | 10 | Female | 7110N212 | 00000000 | ||
 |
Cup | Temp., ° F | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
For Surface Texture | For Surface Type | For Use With | Color | Dia., mm | Ht., mm | No. of Bellows | Compressed Cup Ht., mm | Min. | Max. | Mounting Hole Dia., mm | Each | |||
Silicone Rubber Cup | ||||||||||||||
| Smooth, Textured | Curved, Flat, Varied Height | Curved and Irregular Objects, Plastic, Sheet Metal | Green | 43.50 | 47.00 | 2 | 27.00 | -20 | 355 | 4.60 | 5427A248 | 000000 | ||
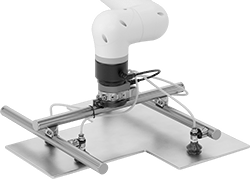
Lifters with EPDM Foam Pads
 |  |
Shown with Robot Arm (Not Included) |
Lifters with pads are the best choice for lifting items with uneven surfaces, such as wood and coarse plastic. Made of foam, the pads compress around bumps, grooves, and other textures to maintain a tight seal. They are also soft enough to lift delicate items without damaging them.
Maximum Weight Capacity—Maximum weight capacity is achieved only when lifting items with smooth, nonporous surfaces, such as glass and sheet metal. Materials like cardboard leak air when lifted, which reduces your lifter’s capacity. For instance, you can lift about 50% of the maximum capacity when using these lifters on a cardboard box similar to those we ship our parts in. Maximum capacity is also reduced when lifted items don’t fully cover all suction points.
Wt. Cap., lb. | Overall, mm | Temp., ° F | Air Inlet | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
For Robot Arm Mfr. (Series/Model No.) | Max. Vacuum, in. Hg | Max. | Reduced | Air Consumption @ Pressure | No. of Vacuum Ports | Pad Ht., mm | Ht. | Wd. | Housing Material | Min. | Max. | Bolt Circle Dia., mm | Connection Port | Connection | For Tube OD, mm | Gender | Each | |||
Schmalz FXCB Series | ||||||||||||||||||||
| FANUC (CRX/5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) | 17.7 | 78 | 40 | 7.7 scfm @ 80 psi | 45 | 20 | 137 | 331 | Polyurethane Rubber | 45 | 100 | 50 | Tube | Push to Connect | 10 | Female | 5096N12 | 000000000 | ||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR7e, UR10, UR10e, UR12e, UR15, UR16e) | 17.7 | 78 | 40 | 7.7 scfm @ 80 psi | 45 | 20 | 137 | 331 | Polyurethane Rubber | 45 | 100 | 50 | Tube | Push to Connect | 10 | Female | 7110N211 | 00000000 | ||
 |
Ht., mm | Lg., mm | Wd., mm | Each | |||
|---|---|---|---|---|---|---|
EPDM Foam | ||||||
| 20 | 300 | 130 | 6157N141 | 0000000 | ||
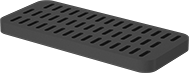
Robot-Ready Vacuum Lifters
Lifters with HDPE/TPE Cups
 |
Shown with Robot Arm (Not Included) |
 |
2 Cups |
 |
4 Cups |
Lifters with cups are the best choice for most lifting. Made of plastic and rubber, the cups are more durable and last longer than foam pads. Move the cups along the rails to position suction right where you need it.
Connect these lifters directly to the port at the end of your robot arm for power and control. An integrated vacuum switch tells your robot when an item is picked up, so it can move to the next location. They come with tubing, fittings, and cups.
4 Cups—Vacuum lifters with 4 cups give you more stability than those with 2 cups when lifting items with large surfaces, such as cardboard boxes or glass.
For Universal Robots Robot Arms—Lifters for Universal Robots arms are UR+ certified, so they’ve been tested to work seamlessly with your robot. For simple integration with your teach pendant software, download the URCap plug-in from the manufacturer’s website.
Maximum Weight Capacity—Maximum weight capacity is achieved only when lifting items with smooth, nonporous surfaces, such as glass and sheet metal. Materials like cardboard leak air when lifted, which reduces your lifter’s capacity. For instance, you can lift about 10% of the maximum capacity when using lifters with cups on a cardboard box similar to those we ship our parts in. When using lifters with pads, you can lift about 40% of the maximum capacity in the same scenario.
2 Cups | 4 Cups | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Air Inlet | Wt. Cap., lb. | Wt. Cap., lb. | |||||||||||||
For Robot Arm Mfr. (Series/Model No.) | Air Consumption @ Pressure | Connection | Thread Type | Pipe Size | Gender | Max. | Reduced | Each | Max. | Reduced | Each | ||||
Schmalz RECBi Series | |||||||||||||||
| FANUC (CRX/5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) | 3.1 scfm @ 85 psi | Threaded | BSPP | 1/8 | Female | 56 | 7 | 6406N311 | 000000000 | 112 | 15 | 6406N313 | 000000000 | ||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR7e, UR10, UR10e, UR12e, UR15, UR16e) | 3.1 scfm @ 85 psi | Threaded | BSPP | 1/8 | Female | 56 | 7 | 6406N312 | 00000000 | 112 | 15 | 6406N314 | 00000000 | ||
Lifters with EPDM Foam Pads
 |  |
Shown with Robot Arm (Not Included) |
Lifters with pads are the best choice for lifting items with uneven surfaces, such as wood and coarse plastic. Made of foam, the pads compress around bumps, grooves, and other textures to maintain a tight seal. They are also soft enough to lift delicate items without damaging them.
For FANUC Robot Arms—Lifters for FANUC arms come with a 3 m long cord that connects to your robot controller for power and control.
For Universal Robots Robot Arms—Lifters for Universal Robots arms connect directly to the port at the end of your robot arm for power and control. They also have an integrated sensor that communicates vacuum levels. Your robot program can use this data to confirm that an item has been picked up. These lifters are UR+ certified, so they’ve been tested to work seamlessly with your robot. For simple integration with your teach pendant software, download the URCap plug-in from the manufacturer’s website.
30 mm Pad Height—Choose lifters with a 30 mm pad height for lifting very curved or textured items. The thicker pad conforms better to uneven surfaces to maintain the seal you need for suction.
Maximum Weight Capacity—Maximum weight capacity is achieved only when lifting items with smooth, nonporous surfaces, such as glass and sheet metal. Materials like cardboard leak air when lifted, which reduces your lifter’s capacity. For instance, you can lift about 10% of the maximum capacity when using lifters with cups on a cardboard box similar to those we ship our parts in. When using lifters with pads, you can lift about 40% of the maximum capacity in the same scenario.
Wt. Cap., lb. | Air Inlet | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
For Robot Arm Mfr. (Series/Model No.) | Pad Ht., mm | Max. | Reduced | Air Consumption @ Pressure | Connection | Thread Type | Pipe Size | Gender | Each | |||
Piab KCS Series | ||||||||||||
| FANUC (CRX/5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) | 20 | 54 | 24 | 4 scfm @ 60 psi | Threaded | BSPP | 1/8 | Female | 6406N315 | 000000000 | ||
| FANUC (CRX/5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) | 30 | 54 | 24 | 4 scfm @ 60 psi | Threaded | BSPP | 1/8 | Female | 6406N316 | 00000000 | ||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR7e, UR10, UR10e, UR12e, UR15, UR16e) | 20 | 54 | 24 | 4 scfm @ 60 psi | Threaded | BSPP | 1/8 | Female | 6406N123 | 00000000 | ||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR7e, UR10, UR10e, UR12e, UR15, UR16e) | 30 | 54 | 24 | 4 scfm @ 60 psi | Threaded | BSPP | 1/8 | Female | 6406N124 | 00000000 | ||

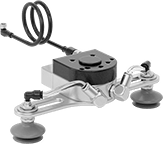
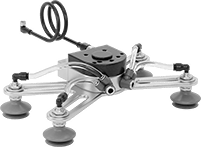
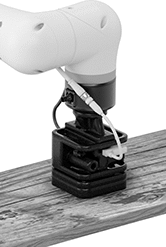
Robot-Ready Electric Vacuum Lifters for Curved and Irregularly Shaped Items
 |  |
Shown with Robot Arm (Not Included) |
 |
Equip your collaborative robot with all it needs to lift bottles and other items with complex shapes. These lifters have a flexible balloon-like cup that conforms to the sharp curves, angles, and uneven surfaces of items that other vacuum lifters may struggle to pick up. Made of Buna-N, the cup resists oil and abrasion. It works for most lifting, including packaging and material handling. A rubber cushion inside the cup protects lifted items from damage if they hit the housing. The cup is held in place with stainless steel spring bands. Slip them off to replace a worn cup.
These lifters come with a robot arm mount, vacuum generator, and power cord for a quick, easy setup. Use the mount to bolt them directly to your robot arm. The cord plugs right into your robot arm for power and control. Because the suction is generated by electricity, there’s no need for compressed air or air control valves. You can configure digital inputs and outputs in your robot’s control program to turn suction on and off.
Lifters with Buna-N Cups
Cup | Overall, mm | Temp., ° F | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
For Robot Arm Mfr. (Series/Model No.) | Max. Vacuum, in. Hg | Max. Wt. Cap., lb. | No. of | Color | Dia., mm | Ht., mm | Dia. | Ht. | Housing Material | Min. | Max. | Each | |||
Convum SGE Series | |||||||||||||||
| FANUC (CRX/5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) Universal Robots (UR3, UR3e, UR5, UR5e, UR7e, UR10, UR10e, UR12e, UR15, UR16e) | 20 | 4 | 1 | Black | 71 | 44.5 | 86 | 164 | ABS | 60 | 100 | 9136N13 | 000000000 | ||
 |  |  |
Replacement Cups | Replacement Spring Band Sets | Replacement Cushion and Filter Sets |
Cup, mm | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
Component | Material | Cushion Material | Filter Material | Cup Material | For Cup Dia., mm | Includes | Dia. | Ht. | Each | ||
| Replacement Cup | — | — | — | Buna-N | — | — | 71 | 44.5 | 6157N117 | 0000000 | |
| Replacement Cup | — | — | — | Silicone Rubber | — | — | 71 | 44.5 | 6157N116 | 000000 | |
| Replacement Spring Band Set | Stainless Steel | — | — | — | 71 | Inner Spring Band, Outer Spring Band | — | — | 6157N121 | 00000 | |
| Replacement Cushion and Filter Set | — | Silicone Rubber | Metal | — | 71 | — | — | — | 6157N119 | 00000 | |
