


























Filter by
Clamp Type
For Robot Arm Manufacturer
For Robot Arm Manufacturer Series
Component
Color
DFARS Specialty Metals
Export Control Classification Number (ECCN)
Finish
Mounting Location
REACH
RoHS
U.S.–Mexico–Canada Agreement (USMCA) Qualifying
Material
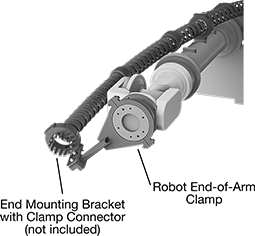
Cable and Hose Carrier to Robot End-of-Arm Clamps
 |  |
For Robot Arm Mfr. (Series/Model No.) | Bar Dia., mm | Color | Clamp Type | Each | ||
|---|---|---|---|---|---|---|
| Staubli (TX200) | 30 | Black | Screw | 5827N17 | 0000000 | |
EachShips in 1-3 weeks  Select a compatible file type: Parasolid | ||||||
