


























Filter by
Shaft Diameter
Body Shape
Number of Shafts
Number of Wire Leads
Face Shape

Full Step Increment
Mounting Position
Maximum Holding Torque
Input Voltage
Wire Connection

Voltage
RoHS
DFARS Specialty Metals
Export Control Classification Number (ECCN)
Economy Stepper Motors
Motors
 |
 |
 |
Maximum Holding Torque—Holding torque is the force needed to move the shaft out of position when it is stationary. When the shaft is in motion, torque generally decreases as speed increases. Use a torque-speed curve to confirm which motor will work for your application. Click on a part number and select “Product Detail” to view the curve for a motor.
Full Step Increment—Full step increment is the rotation of the shaft from one position to the next. A smaller full step increment means the rotor has more teeth, producing smoother and more precise motion. 1.8° is considered standard.
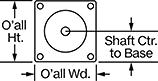
Overall | Shaft | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
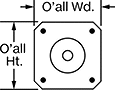
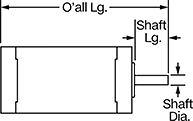
Max. Holding Torque, in·ozf | Max. Rotation Speed, rpm | Max. Current per Phase, amp | Full Step Increment | Stepper Motor Polarity | No. of Wire Leads | Lg. | Wd. | Ht. | Dia., mm | Lg., mm | Ctr.-to-Base Lg. | Type | No. of Shafts | Min. Temp. | Each | |||
Square Body | ||||||||||||||||||
NEMA 23 Frame Size | ||||||||||||||||||
| 125 | 1,000 | 2 | 1.8° | Bipolar | 4 | 3" | 2.2" | 2.2" | 6 | 21 | 1.1" | Solid | 1 | Not Rated | 4798N13 | 000000 | ||
Clean Room Stepper Motors
Motors
 |
 |  |
Maximum Holding Torque—Holding torque is the force needed to move the shaft out of position when it is stationary. When the shaft is in motion, torque generally decreases as speed increases. Use a torque-speed curve to confirm which motor will work for your application. Click on a part number and select “Product Detail” to view the curve for a motor.
Full Step Increment—Full step increment is the rotation of the shaft from one position to the next. A smaller full step increment means the rotor has more teeth, producing smoother and more precise motion. 1.8° is considered standard.
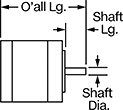
Overall | Shaft | Temp. Range, ° F | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Max. Holding Torque, in·ozf | Max. Rotation Speed, rpm | Max. Current per Phase, amp | Full Step Increment | Stepper Motor Polarity | No. of Wire Leads | Lg. | Wd. | Ht. | Dia., mm | Lg., mm | Type | No. of Shafts | Vacuum Rating, Torr | Min. | Max. | Clean Room Std. | Each | |||
Square Body | ||||||||||||||||||||
NEMA 23 Frame Size | ||||||||||||||||||||
| 181 | 1,300 | 2.8 | 1.8° | Bipolar | 4 | 3.1" | 2.3" | 2.3" | 6 | 21 | D-Profile | 1 | 1× 10^-7 | 0 | 120 | ISO Class 1 | 4799N15 | 000000000 | ||
| 237 | 2,000 | 4 | 1.8° | Bipolar | 4 | 4" | 2.3" | 2.3" | 6 | 21 | D-Profile | 1 | 1× 10^-7 | 0 | 120 | ISO Class 1 | 4799N16 | 00000000 | ||
Stepper Servomotors with Integrated Drive
 |
Overall | Shaft | No. of Inputs/Outputs | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Max. Holding Torque, in·ozf | Max. Rotation Speed, rpm | Voltage, V DC | Current, amp | Step Resolution | Full Step Increment | Lg. | Wd. | Ht. | Dia., mm | Lg., mm | Ctr.-to-Base Lg. | Control Communication Protocol | Digital Inputs | Analog Inputs | Digital Outputs | Enclosure Rating | Each | |||
NEMA 17 Frame Size | ||||||||||||||||||||
| 40 | 3,000 | 12 to 48 | 1.3 | 1 to 1/256 | 1.8° | 3.5" | 1.7" | 3" | 6 | 18 | 0.83" | Modbus RTU | 8 | 1 | 4 | IP20 | 5361N14 | 0000000 | ||
| 59 | 3,000 | 12 to 48 | 1.4 | 1 to 1/256 | 1.8° | 3.7" | 1.7" | 3" | 6 | 18 | 0.83" | Modbus RTU | 8 | 1 | 4 | IP20 | 5361N15 | 000000 | ||
| 73 | 3,000 | 12 to 48 | 1.3 | 1 to 1/256 | 1.8° | 4.1" | 1.7" | 3" | 6 | 18 | 0.83" | Modbus RTU | 8 | 1 | 4 | IP20 | 5361N16 | 000000 | ||
Clamping Precision Flexible Shaft Couplings
 |
Spiral Cut |
Designed to grip evenly around your shaft, these couplings provide more holding power than set screw couplings without marring the shaft. Tighten the clamping screws to secure.
Spiral Cut—Spiral couplings have long cuts in their body for flexibility to handle parallel, axial, and angular misalignment better than parallel couplings. However, they’re not as rigid. Often used for light duty encoder and stepper drive applications, they allow zero backlash (no play) and never need lubrication. They’re also known as helical beam couplings.
7075 Aluminum—7075 aluminum couplings are lightweight with good corrosion resistance.
303 Stainless Steel—303 stainless steel couplings offer excellent corrosion resistance.
Misalignment Capability | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
For Shaft Diameter | Overall Lg., mm | OD, mm | Max. Rotation Speed, rpm | Max. Torque, in·lbf | Parallel, mm | Angular | Axial, mm | For Rotary Motion | Each | |||
Spiral Cut | ||||||||||||
7075 Aluminum | ||||||||||||
| 6 mm × 3/16" | 28 | 20 | 6,000 | 10 | 0.2 | 3° | 0.12 | Forward/Reverse, Start/Stop | 2464K15 | 000000 | ||
| 6 mm × 1/4" | 28 | 20 | 6,000 | 10 | 0.2 | 3° | 0.12 | Forward/Reverse, Start/Stop | 2464K2 | 00000 | ||
| 6 mm × 1/4" | 30 | 25 | 6,000 | 27 | 0.38 | 3° | 0.25 | Forward/Reverse, Start/Stop | 2464K3 | 00000 | ||
| 6 mm × 3/8" | 30 | 25 | 6,000 | 27 | 0.38 | 3° | 0.25 | Forward/Reverse, Start/Stop | 2464K23 | 00000 | ||
| 6 mm × 4 mm | 28 | 20 | 6,000 | 10 | 0.2 | 3° | 0.12 | Forward/Reverse, Start/Stop | 2463K23 | 00000 | ||
| 6 mm × 5 mm | 28 | 20 | 6,000 | 10 | 0.2 | 3° | 0.12 | Forward/Reverse, Start/Stop | 2463K4 | 00000 | ||
| 6 mm × 6 mm | 28 | 20 | 6,000 | 10 | 0.2 | 3° | 0.12 | Forward/Reverse, Start/Stop | 2463K5 | 00000 | ||
| 6 mm × 6 mm | 30 | 25 | 6,000 | 27 | 0.38 | 3° | 0.25 | Forward/Reverse, Start/Stop | 2463K24 | 00000 | ||
| 7 mm × 6 mm | 30 | 25 | 6,000 | 27 | 0.38 | 3° | 0.25 | Forward/Reverse, Start/Stop | 2463K25 | 00000 | ||
| 8 mm × 6 mm | 30 | 25 | 6,000 | 27 | 0.38 | 3° | 0.25 | Forward/Reverse, Start/Stop | 2463K6 | 00000 | ||
| 9 mm × 6 mm | 30 | 25 | 6,000 | 27 | 0.38 | 3° | 0.25 | Forward/Reverse, Start/Stop | 2463K29 | 00000 | ||
| 10 mm × 6 mm | 30 | 25 | 6,000 | 27 | 0.38 | 3° | 0.25 | Forward/Reverse, Start/Stop | 2463K34 | 00000 | ||
303 Stainless Steel | ||||||||||||
| 4 mm × 6 mm | 28 | 20 | 6,000 | 15 | 0.2 | 3° | 0.12 | Forward/Reverse, Start/Stop | 2463K124 | 000000 | ||
| 5 mm × 6 mm | 28 | 20 | 6,000 | 15 | 0.2 | 3° | 0.12 | Forward/Reverse, Start/Stop | 2463K125 | 000000 | ||
| 6 mm × 6 mm | 28 | 20 | 6,000 | 15 | 0.2 | 3° | 0.12 | Forward/Reverse, Start/Stop | 2463K126 | 000000 | ||
| 6 mm × 6 mm | 30 | 25 | 6,000 | 40 | 0.38 | 3° | 0.25 | Forward/Reverse, Start/Stop | 2463K301 | 000000 | ||
| 6 mm × 8 mm | 30 | 25 | 6,000 | 40 | 0.38 | 3° | 0.25 | Forward/Reverse, Start/Stop | 2463K304 | 000000 | ||
| 6 mm × 9 mm | 30 | 25 | 6,000 | 40 | 0.38 | 3° | 0.25 | Forward/Reverse, Start/Stop | 2463K307 | 000000 | ||
| 6 mm × 10 mm | 30 | 25 | 6,000 | 40 | 0.38 | 3° | 0.25 | Forward/Reverse, Start/Stop | 2463K312 | 000000 | ||
Set Screw Precision Flexible Shaft Couplings
 |
Tighten the set screws to fasten these couplings to your shaft. Set screws bite into the shaft to hold the couplings in place. All are lightweight, corrosion-resistant aluminum.
Spiral Cut—Spiral couplings have long, continuous cuts in the body, making them flexible enough to handle parallel, axial, and angular misalignment. Often used for light duty encoder and stepper drive applications, they allow zero backlash (no play) and never need lubrication. They’re also known as helical beam couplings. Spiral couplings are less rigid than parallel couplings.
Misalignment Capability | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
For Shaft Diameter | Overall Lg., mm | OD, mm | Max. Rotation Speed | Max. Torque, in·lbf | Angular | Axial, mm | For Rotary Motion | Each | |||
Spiral Cut | |||||||||||
7075 Aluminum | |||||||||||
| 6 mm × 3 mm | 19.1 | 19.1 | Not Rated | 20 | 3° | 0.15 | Forward/Reverse, Start/Stop | 4147N141 | 000000 | ||
| 6 mm × 3 mm | 22.4 | 15.9 | Not Rated | 12 | 3° | 0.2 | Forward/Reverse, Start/Stop | 4147N133 | 00000 | ||
| 6 mm × 4 mm | 19.1 | 19.1 | Not Rated | 20 | 3° | 0.15 | Forward/Reverse, Start/Stop | 4147N142 | 00000 | ||
| 6 mm × 4 mm | 25.4 | 19.1 | Not Rated | 25 | 3° | 0.2 | Forward/Reverse, Start/Stop | 4147N155 | 00000 | ||
| 6 mm × 5 mm | 19.1 | 19.1 | Not Rated | 20 | 3° | 0.15 | Forward/Reverse, Start/Stop | 4147N143 | 00000 | ||
| 6 mm × 5 mm | 22.4 | 15.9 | Not Rated | 12 | 3° | 0.2 | Forward/Reverse, Start/Stop | 4147N135 | 00000 | ||
| 6 mm × 5 mm | 25.4 | 19.1 | Not Rated | 25 | 3° | 0.2 | Forward/Reverse, Start/Stop | 4147N156 | 00000 | ||
| 6 mm × 6 mm | 19.1 | 19.1 | Not Rated | 20 | 3° | 0.15 | Forward/Reverse, Start/Stop | 4147N144 | 00000 | ||
| 6 mm × 6 mm | 22.4 | 15.9 | Not Rated | 12 | 3° | 0.2 | Forward/Reverse, Start/Stop | 4147N136 | 00000 | ||
| 6 mm × 6 mm | 25.4 | 19.1 | Not Rated | 25 | 3° | 0.2 | Forward/Reverse, Start/Stop | 4147N157 | 00000 | ||
| 6 mm × 6 mm | 25.4 | 25.4 | Not Rated | 42 | 3° | 0.15 | Forward/Reverse, Start/Stop | 4147N181 | 00000 | ||
| 6 mm × 6 mm | 31.8 | 31.8 | Not Rated | 84 | 3° | 0.15 | Forward/Reverse, Start/Stop | 4147N195 | 000000 | ||
| 6 mm × 6 mm | 38.1 | 25.4 | Not Rated | 63 | 3° | 0.2 | Forward/Reverse, Start/Stop | 4147N166 | 00000 | ||
| 8 mm × 6 mm | 19.1 | 19.1 | Not Rated | 20 | 3° | 0.15 | Forward/Reverse, Start/Stop | 4147N147 | 00000 | ||
| 8 mm × 6 mm | 25.4 | 19.1 | Not Rated | 25 | 3° | 0.2 | Forward/Reverse, Start/Stop | 4147N161 | 00000 | ||
| 8 mm × 6 mm | 38.1 | 25.4 | Not Rated | 63 | 3° | 0.2 | Forward/Reverse, Start/Stop | 4147N169 | 00000 | ||
| 10 mm × 6 mm | 25.4 | 25.4 | Not Rated | 42 | 3° | 0.15 | Forward/Reverse, Start/Stop | 4147N188 | 00000 | ||
| 10 mm × 6 mm | 38.1 | 25.4 | Not Rated | 63 | 3° | 0.2 | Forward/Reverse, Start/Stop | 4147N174 | 00000 | ||
| 11 mm × 6 mm | 31.8 | 31.8 | Not Rated | 84 | 3° | 0.15 | Forward/Reverse, Start/Stop | 4147N217 | 000000 | ||
| 13 mm × 6 mm | 31.8 | 31.8 | Not Rated | 84 | 3° | 0.15 | Forward/Reverse, Start/Stop | 4147N223 | 000000 | ||
