
















Manufacturer Manufacturer | Show |
|---|
|
Manufacturer Manufacturer | Hide |
|---|
|
|
Grip Style Grip Style |
|---|
 | Parallel |
Mount Type Mount Type |
|---|
| Bolt On | |
Stroke Width Stroke Width |
|---|
|
External Gripping Force External Gripping Force |
|---|
Finger Configuration Finger Configuration |
|---|
| 2-Finger | |
Internal Gripping Force Internal Gripping Force |
|---|
Robot Cell Component Robot Cell Component | Show |
|---|
|
Robot Cell Component Robot Cell Component | Hide |
|---|
|
Jaw Material Jaw Material |
|---|
|

Minimum Temperature Minimum Temperature |
|---|
|
Application Application |
|---|
|
Signal Output Type Signal Output Type |
|---|
|
Bolt Hole Diameter Bolt Hole Diameter |
|---|
|
REACH (Registration, Evaluation, Authorization and Restriction of Chemicals) REACH (Registration,Evaluation, Authorization and Restriction of Chemicals) |
|---|
|
Robot-Ready Electric Grippers
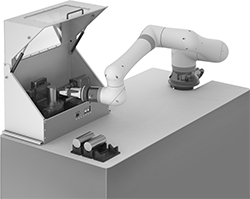
Including a robot tool mount and electrical connectors, these grippers come ready to attach to robot arms with standard ISO mounting hole patterns. Good for areas without compressed air, they use electricity to pick and place items in packaging, assembly, and machine-tending applications. All have a servomotor that opens and closes the grippers with equal force to grasp and release items from the inside or outside. Install the included software directly into your controller or teach pendant to program your gripper.
Select grippers that match your arm’s manufacturer series and model number or that are compatible with your electrical connection and signal output. Grippers with PNP signal output communicate proximity with a positive signal, while those with NPN signal output send a negative signal.
Grippers for FANUC CRX arms are FANUC approved, and grippers for Universal Robots (UR) arms are UR+ certified, so they've been tested to work seamlessly.
Warning: Never use to lift people or items over people.
![]() For technical drawings and 3-D models, click on a part number.
For technical drawings and 3-D models, click on a part number.

Gripper Fingers and
Robot Arm (Not Included)


Discrete I/O grippers have four set gripping forces to move items—use a screwdriver to select the force you’ll need. Since these grippers open and close at the same force and stroke with every cycle, they’re good for picking items of a similar size and material. A discrete I/O signal and included inductive proximity sensor send information about an item’s location to your robot arm. All of these grippers are suitable for use in clean rooms rated to ISO Class 5. They’re also rated IP30 to prevent objects greater than 2.5 mm, such as a screwdriver, from making contact with live circuits.
ISO/TS 15066 grippers help you meet international safety standards. They don’t have pinch points or sharp edges, so you can use them on robots that will be near people.
Grippers with an LED status ring have three programmable colors to show if the gripper picked or released an item, or failed.
O'all | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
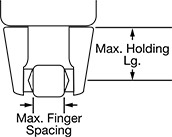
| For Robot Arm Manufacturer (Series/Model No.) | External / Internal Gripping Force | Max. Gripping Cap. | Cycles per Sec. | Stroke Wd., mm | Max. Finger Spacing, mm | Max. Holding Lg., mm | Wt. | Mounting Hole Pattern Compatibility | Lg., mm | Wd., mm | Dp., mm | Manufacturer (Series/Model No.) | Each | |
Nylon Plastic Housing and Steel Jaws | ||||||||||||||
PNP Signal Output and M8 Plug, 24V DC | ||||||||||||||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR10, UR10e) | 7.5 lbs. 15 lbs. 22.5 lbs. 30 lbs. | 1.5 lbs. / 0.7 kg | 8 | 6 | 28 | 70 | 1.5 lbs. / 0.7 kg | ISO 50 | 120 | 92 | 86 | Schunk (EGP 40) | 0000000 | 000000000 |
| Universal Robots (UR16, UR16e) | 7.5 lbs. 15 lbs. 22.5 lbs. 30 lbs. | 1.5 lbs. / 0.7 kg | 8 | 6 | 28 | 70 | 1.5 lbs. / 0.7 kg | ISO 50 | 120 | 92 | 86 | Schunk (EGP 40) | 0000000 | 00000000 |
ISO/TS 15066 Nylon Plastic Housing and Steel Jaws | ||||||||||||||
PNP Signal Output and M8 Plug, 24V DC | ||||||||||||||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR10, UR10e, UR16, UR16e) | 2 lbs. 4 lbs. 6 lbs. 8 lbs. | 0.4 lbs. / 0.2 kg | 5 | 4 | 17 | 32 | 0.8 lbs. / 0.36 kg | ISO 50 | 102 | 93 | 90 | Schunk (Co-act EGP-C 25) | 0000000 | 00000000 |
| Universal Robots (UR3, UR3e, UR5, UR5e, UR10, UR10e, UR16, UR16e) | 7.5 lbs. 15 lbs. 22.5 lbs. 30 lbs. | 1.5 lbs. / 0.7 kg | 2 | 6 | 28 | 50 | 1.3 lbs. / 0.59 kg | ISO 50 | 118 | 93 | 90 | Schunk (Co-act EGP-C 40) | 0000000 | 00000000 |
PNP Signal Output and Wire Leads, 24V DC—With LED Status Ring | ||||||||||||||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR10, UR10e, UR16, UR16e) | 2 lbs. 4 lbs. 6 lbs. 8 lbs. | 0.4 lbs. / 0.2 kg | 5 | 4 | 17 | 32 | 1.3 lbs. / 0.63 kg | ISO 50 | 102 | 93 | 90 | Schunk (Co-act EGP-C 25) | 0000000 | 00000000 |
| Universal Robots (UR3, UR3e, UR5, UR5e, UR10, UR10e, UR16, UR16e) | 7.5 lbs. 15 lbs. 22.5 lbs. 30 lbs. | 1.5 lbs. / 0.7 kg | 2 | 6 | 28 | 50 | 1.8 lbs. / 0.86 kg | ISO 50 | 118 | 93 | 90 | Schunk (Co-act EGP-C 40) | 0000000 | 00000000 |
| Universal Robots (UR3, UR3e, UR5, UR5e, UR10, UR10e, UR16, UR16e) | 12 lbs. 24 lbs. 36 lbs. 48 lbs. | 2.2 lbs. / 1 kg | 2 | 8 | 34 | 64 | 2.6 lbs. / 1.22 kg | ISO 50 | 134 | 125 | 86 | Schunk (Co-act EGP-C 50) | 0000000 | 00000000 |
| Universal Robots (UR3, UR3e, UR5, UR5e, UR10, UR10e, UR16, UR16e) | 14 lbs. 25.5 lbs. 38.5 lbs. 51 lbs. | 2.2 lbs. / 1 kg | 2 | 10 | 44 | 64 | 2.6 lbs. / 1.22 kg | ISO 50 | 144 | 125 | 86 | Schunk (Co-act EGP-C 64) | 0000000 | 00000000 |
Simply connect these fingers to your Schunk gripper and start moving items. Made of lightweight but also strong nylon, all have rubber gripping pads to protect items from damage.
Warning: Never use to lift people or items over people.
Width, mm | Finger | For Gripper Jaw | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| For Manufacturer (Series/Model No.) | Min. | Max. | Lg., mm | Wd., mm | Dp., mm | Wd., mm | Dp., mm | Mounting Hardware Included | Pair | |
Nylon Plastic | ||||||||||
| Schunk (Co-act EGP-C, EGP 25) | 0 | 6 | 32 | 20 | 26 | 4 | 10 | Yes | 0000000 | 0000000 |
| Schunk (Co-act EGP-C, EGP 25) | 6 | 12 | 32 | 17 | 26 | 4 | 10 | Yes | 0000000 | 000000 |
| Schunk (Co-act EGP-C, EGP 40) | 0 | 12 | 50 | 25.5 | 30 | 6 | 16 | Yes | 0000000 | 000000 |
| Schunk (Co-act EGP-C, EGP 40) | 12 | 24 | 50 | 19.5 | 30 | 6 | 16 | Yes | 0000000 | 000000 |
| Schunk (Co-act EGP-C, EGP 50) | 0 | 16 | 64 | 31.7 | 33.7 | 8 | 18 | Yes | 0000000 | 000000 |
| Schunk (Co-act EGP-C, EGP 50) | 16 | 32 | 64 | 24.1 | 33.5 | 8 | 18 | Yes | 0000000 | 000000 |
| Schunk (Co-act EGP-C, EGP 64) | 0 | 20 | 80 | 39 | 36.9 | 10 | 20 | Yes | 000000 | 000000 |
| Schunk (Co-act EGP-C, EGP 64) | 20 | 40 | 80 | 29 | 34 | 10 | 20 | Yes | 0000000 | 000000 |


Profinet Type B grippers can be programmed to pick items of various sizes and materials from one cycle to the next. Input and save the specific force you’ll need for each object you’ll be moving. A Profinet Type B signal sends information about an item‘s location to your robot arm. If these grippers and other devices are connected to your robot power supply at the same time, we recommend adding an external power supply to reach the maximum gripping force. These grippers are rated IP46 to prevent objects larger than 1 mm, such as wire, from making contact with a live circuit. They also withstand high-pressure jets of water, so they can be washed down. Those that come with fingers have fingers that work with a wide range of items, but can also be removed to add custom fingers.
O'all | Finger | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| For Robot Arm Manufacturer (Series/Model No.) | External/Internal Gripping Force Range | Max. Gripping Cap. | Cycles per Sec. | Stroke Wd., mm | Max. Finger Spacing, mm | Max. Holding Lg., mm | Wt. | Mounting Hole Pattern Compatibility | Lg., mm | Wd., mm | Dp., mm | Lg., mm | Wd., mm | Dp., mm | Each | |
Aluminum Housing and Steel Jaws | ||||||||||||||||
PNP Signal Output and M8 Plug, 24V DC | ||||||||||||||||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR10, UR10e, UR16, UR16e) | 11-134 lbs. | 6.6 lbs. / 3 kg | 8 | 42 | 50 | 86 | 4.6 lbs. / 2.13 kg | ISO 50 | 121 | 112 | 100 | __ | __ | __ | 0000000 | 000000000 |
Aluminum Housing and Steel Jaws—With Fingers | ||||||||||||||||
PNP Signal Output and M8 Plug, 24V DC | ||||||||||||||||
| Universal Robots (UR3, UR3e, UR5, UR5e, UR10, UR10e, UR16, UR16e) | 11-134 lbs. | 6.6 lbs. / 3 kg | 8 | 42 | 85 | 86 | 5.7 lbs. / 2.63 kg | ISO 50 | 121 | 112 | 100 | 100 | 33 | 28 | 0000000 | 000000000 |