
















Manufacturer Manufacturer | Show |
|---|
|
Manufacturer Manufacturer | Hide |
|---|
Manufacturer Series Manufacturer Series |
|---|
Manufacturer Model Number Manufacturer Model Number |
|---|
Mounting Location Mounting Location |
|---|
| End of Robot Arm | Robot Tool |
Length Length |
|---|
|
DFARS (Defense Acquisition Regulations Supplement) DFARS (Defense AcquisitionRegulations Supplement) |
|---|
Robot Cell Component Robot Cell Component | Show |
|---|
|
Robot Cell Component Robot Cell Component | Hide |
|---|
|
Number of Bolt Holes Number of Bolt Holes |
|---|
|


Specifications Met Specifications Met |
|---|
|
Air Inlet Connection Type Air Inlet Connection Type |
|---|
| Tube | |
Bolt Hole Length Bolt Hole Length |
|---|
|
REACH (Registration, Evaluation, Authorization and Restriction of Chemicals) REACH (Registration,Evaluation, Authorization and Restriction of Chemicals) |
|---|
|
RoHS (Restriction of Hazardous Substances) RoHS (Restriction ofHazardous Substances) |
|---|
|
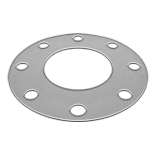
Robot Vacuum Cup Mounts

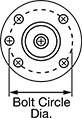
Attach threaded vacuum cups to robot arms with different ISO mounting patterns. These mounts have a universal thread for attaching your vacuum cups as well as inlet ports to connect air-powered vacuum pumps, so you can perform a variety of pick-and-place tasks. Use the 6-mm inlet port to move light objects or when working in tight spaces. Use the 10-mm inlet port to move heavy or porous objects, such as corrugated cartons. Made of acetal plastic, these mounts are strong, but lightweight, and stand up to moisture and chemicals. They include the hardware you need to connect them to robot arms. If you don't see your robot model number listed, measure the bolt circle diameter to determine mounting compatibility.
To preserve vacuum pressure, insert a 6-mm or 10-mm plug into the end of whichever inlet port you are not using.
Universal thread adapters let you join mounts and vacuum cups with different thread types.
Warning: Never use to lift people or items over people.
![]() For technical drawings and 3-D models, click on a part number.
For technical drawings and 3-D models, click on a part number.
Robot Tool (Threaded) | End of Robot Arm (Bolt On) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Thread Size | Thread Lg. | No. of Threaded Holes | Bolt Circle Dia. (Mounting Hole Pattern Compatibility) | Mounting Fasteners Included | Wt. | Max. Load Cap. | Specifications Met | For Robot Arm Manufacturer (Series/Model Number) | Each | |
Black Acetal Plastic | ||||||||||
| 3/8" | 7/16" | 1 | 31.5 mm (ISO 31.5) 40 mm (ISO 40) 50 mm (ISO 50) 63 mm (ISO 63) | Yes | 0.4 lbs. / 0.18 kg | 55 lbs. / 25 kg | FDA Compliant 21 CFR 177.2470, FDA Compliant 21 CFR 177.2600 | ABB (IRB 120; IRB 1200; IRB 140; IRB 14000; IRB 14050; IRB 1410; IRB 1520ID; IRB 1600; IRB 1660ID; IRB 2400; IRB 2600; IRB 2600ID; IRB 360) FANUC (CR 4iA, 7iA; CRX 10iA, 10iA/L; LR Mate 7L; M-10iD; M-20 iA) KUKA Robotics (KR 10 R1100-2) Omron (TM 5, 12, 14) Precise Automation (PAVP6; PF3400; PF 400; PP100) Productive Robotics (OB7) Staubli (TX2 90) Universal Robots (UR3; UR3e; UR5; UR5e; UR10; UR10e; UR16; UR16e) Yaskawa/Motoman (GP 7, 8, 12, 25; MH 3BM, 3F, 5LS II, 5S II, JF; MPP 3H, 3S; HC 10T; SIA 10D, 10F, 20D, 20F; MotoMini) | 0000000 | 0000000 |
Pipe Size | Thread Type | Thread Length | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (A) | (B) | Thread Size (B) | (A) | (B) | (A) | (B) | Hex Size | OD | Tensile Strength, psi | Hardness | O-Ring Material | Each | |
304 Stainless Steel | |||||||||||||
| 3/8 | __ | 10-32, M5 | BSPP, BSPT, NPT, NPTF, Universal | BSPP, BSPT, NPT, NPTF, Metric, UNF, Universal | 0.25" | 13/64" | 13/64" | 27/32" | 73,000 | Rockwell B70 | Buna-N Rubber | 00000000 | 000000 |
| 3/8 | 1/4 | __ | BSPP, BSPT, NPT, NPTF, Universal | BSPP, BSPT, NPT, NPTF, Universal | 0.25" | 1/4" | 13/64" | 27/32" | 73,000 | Rockwell B70 | Buna-N Rubber | 00000000 | 00000 |
| 3/8 | 1/8 | __ | BSPP, BSPT, NPT, NPTF, Universal | BSPP, BSPT, NPT, NPTF, Universal | 0.25" | 1/4" | 13/64" | 27/32" | 73,000 | Rockwell B70 | Buna-N Rubber | 00000000 | 00000 |
| 3/8 | 3/8 | __ | BSPP, BSPT, NPT, NPTF, Universal | BSPP, BSPT, NPT, NPTF, Universal | 0.25" | 1/4" | 13/64" | 27/32" | 73,000 | Rockwell B70 | Buna-N Rubber | 00000000 | 00000 |


Pipe Size | Thread Type | Thread Length | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (A) | (B) | Thread Size (B) | (A) | (B) | (A) | (B) | Hex Size | OD | Tensile Strength, psi | Hardness | O-Ring Material | Each | |
304 Stainless Steel | |||||||||||||
| 3/8 | __ | 10-32, M5 | BSPP, BSPT, NPT, NPTF, Universal | BSPP, BSPT, NPT, NPTF, Metric, UNF, Universal | 0.25" | 9/64" | 13/64" | 27/32" | 73,000 | Rockwell B70 | Buna-N Rubber | 00000000 | 000000 |
| 3/8 | 1/4 | __ | BSPP, BSPT, NPT, NPTF, Universal | BSPP, BSPT, NPT, NPTF, Universal | 0.25" | 1/4" | 13/64" | 27/32" | 73,000 | Rockwell B70 | Buna-N Rubber | 00000000 | 00000 |
| 3/8 | 1/8 | __ | BSPP, BSPT, NPT, NPTF, Universal | BSPP, BSPT, NPT, NPTF, Universal | 0.25" | 1/4" | 13/64" | 27/32" | 73,000 | Rockwell B70 | Buna-N Rubber | 00000000 | 00000 |
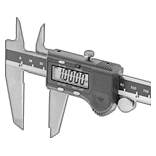
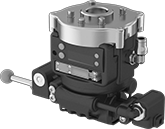
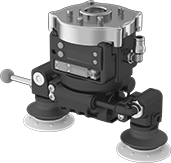
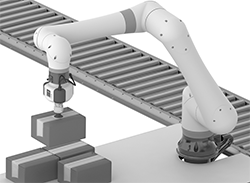
Robot-Ready Vacuum Lifters

With robot tool mounts and connectors, these vacuum lifters come ready to attach to robot arms with standard ISO mounting hole patterns. Use them with compressed air to grip, lift, and move items with curves, angles, and varied heights. Also known as venturi devices, they generate suction without an installed vacuum system. If you don't see your robot model number listed, measure the bolt circle diameter to determine mounting compatibility.
Lifters and lifters with cups have two arms with vacuum cup connections. You can adjust the width of the arms to handle large items as well as tilt them to better grip uneven shapes. You can even remove an arm for applications that require only one cup. All of these lifters have a digital display for viewing the status of the lifter and controlling the vacuum. They’re protected from dust and water splashes. Lifters don’t include cups. Add vacuum cups that meet your specific needs. Lifters with cups include eight silicone and polyurethane rubber cups with different sizes and number of bellows. Cups with more bellows are better for handling items that have more variations in shape.
Lifters with a foam pad have an EPDM foam pad that’s soft enough to conform to items without damaging them. They’re best for delicate surfaces as well as porous surfaces where cups cannot obtain an airtight grip. They are not protected from dust and water splashes.
Lifters with PNP signal output communicate proximity with a positive signal, while those with NPN signal output send a negative signal.
Choose lifters with an additional port if you’d like to add a pressure transmitter (not included). Your transmitter will convert air pressure to an electrical signal for viewing air measurements on remote displays and programmable logic controllers (PLCs).
Optional sensors can be added to lifters with a foam pad for communicating the grip position to a controller. They require an A-code micro M12 power cord (sold separately).
Warning: Never use to lift people or items over people.
![]() For technical drawings and 3-D models, click on a part number.
For technical drawings and 3-D models, click on a part number.

Female Air Connection | End of Robot Arm | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| For Robot Arm Manufacturer (Series/Model Number) | Cap. @ Vacuum | Max. Vacuum | Air Consumption @ Pressure | For Use With | Pipe Size | Thread Type | Bolt Circle Dia. (Mount. Hole Pattern Compatibility) | Mount. Fasteners Included | Signal Output Type | Each | |
For Smooth and Textured Surfaces | |||||||||||
With Additional Port | |||||||||||
| ABB (IRB 120; IRB 1200) FANUC (CR 4iA, 7iA; LR Mate 7L) KUKA Robotics (KR 10 R1100-2) Precise Automation (PAVP6; PF3400) Yaskawa/Motoman (GP 7, 8; MH 3BM, 3F, 5LS II, 5S II; MPP 3H, 3S) | 15.4 lbs. @ 24 in. of Hg | 24 in. of Hg | 1 scfm @ 60 psi | Bagged Material, Cardboard, Electronics, Glass, Plastic, Sheet Metal | 1/4 | BSPP | 31.5 mm (ISO 31.5) | No | NPN, PNP | 00000000 | 000000000 |
Female Air Connection | End of Robot Arm | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| For Robot Arm Manufacturer (Series/Model Number) | Cap. @ Vacuum | Max. Vacuum | Air Consumption @ Pressure | For Use With | Pipe Size | Thread Type | Bolt Circle Dia. (Mount. Hole Pattern Compatibility) | Mount. Fasteners Included | Signal Output Type | Each | |
For Smooth and Textured Surfaces—Polyurethane and Silicone Rubber Cups | |||||||||||
With Additional Port | |||||||||||
| ABB (IRB 120; IRB 1200) FANUC (CR 4iA, 7iA; LR Mate 7L) KUKA Robotics (KR 10 R1100-2) Precise Automation (PAVP6; PF3400) Yaskawa/Motoman (GP 7, 8; MH 3BM, 3F, 5LS II, 5S II; MPP 3H, 3S) | 15.4 lbs. @ 24 in. of Hg | 24 in. of Hg | 1 scfm @ 60 psi | Bagged Material, Cardboard, Electronics, Glass, Plastic, Sheet Metal | 1/4 | BSPP | 31.5 mm (ISO 31.5) | No | NPN, PNP | 00000000 | 000000000 |

Female Air Connection | End of Robot Arm | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| For Robot Arm Manufacturer (Series/Model Number) | Pad Ht., mm | Cap. @ Vacuum | Max. Vacuum | Air Consumption @ Pressure | For Use With | Pipe Size | Thread Type | Bolt Circle Dia. (Mount. Hole Pattern Compatibility) | Mount. Fasteners Included | Each | |
For Smooth and Textured Surfaces—EPDM Foam Pad | |||||||||||
With Additional Port | |||||||||||
| ABB (IRB 120; IRB 1200) FANUC (CR 4iA, 7iA; LR Mate 7L) KUKA Robotics (KR 10 R1100-2) Precise Automation (PAVP6; PF3400) Yaskawa/Motoman (GP 7, 8; MH 3BM, 3F, 5LS II, 5S II; MPP 3H, 3S) | 10 | 48.8 lbs. @ 24 in. of Hg | 26 in. of Hg | 4 scfm @ 60 psi | Bagged Material, Cardboard, Electronics, Glass, Plastic, Sheet Metal | 1/8 | BSPP | 31.5 mm (ISO 31.5) | No | 00000000 | 000000000 |
| ABB (IRB 120; IRB 1200) FANUC (CR 4iA, 7iA; LR Mate 7L) KUKA Robotics (KR 10 R1100-2) Precise Automation (PAVP6; PF3400) Yaskawa/Motoman (GP 7, 8; MH 3BM, 3F, 5LS II, 5S II; MPP 3H, 3S) | 20 | 48.8 lbs. @ 24 in. of Hg | 26 in. of Hg | 4 scfm @ 60 psi | Bagged Material, Cardboard, Electronics, Glass, Plastic, Sheet Metal | 1/8 | BSPP | 31.5 mm (ISO 31.5) | No | 00000000 | 00000000 |
| ABB (IRB 120; IRB 1200) FANUC (CR 4iA, 7iA; LR Mate 7L) KUKA Robotics (KR 10 R1100-2) Precise Automation (PAVP6; PF3400) Yaskawa/Motoman (GP 7, 8; MH 3BM, 3F, 5LS II, 5S II; MPP 3H, 3S) | 30 | 48.8 lbs. @ 24 in. of Hg | 26 in. of Hg | 4 scfm @ 60 psi | Bagged Material, Cardboard, Electronics, Glass, Plastic, Sheet Metal | 1/8 | BSPP | 31.5 mm (ISO 31.5) | No | 00000000 | 00000000 |

| Output Voltage | Connection Type | Gender | Housing Thread Size | Number of Poles | Each | |
| 1-5V DC | Nano M8 | Male | M8 | 8 | 00000000 | 0000000 |

| Face Dia. | Cable Lead Lg., ft. | Number of Poles | Number of Keyways | Voltage | Current | Wire Lead Gauge | Cable OD | Electrical Connector Component | Each | |
PVC Plastic Housing | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0.3" | 12 | 4 | 1 | 250V AC/250V DC | 4A | 22 | 0.25" | Plug | 0000000 | 000000 |
Robot-Ready Electric Vacuum Lifters
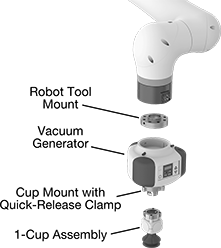
Pick up and move items using suction created by electricity—a good option when compressed air isn't available. Choose from complete kits that include everything you need to connect to your robot and start moving items, or individual components to build your own assembly and replace parts.
Warning: Never use to lift people or items over people.
![]() For technical drawings and 3-D models, click on a part number.
For technical drawings and 3-D models, click on a part number.

Lifter kits include a vacuum generator, cables, and cups. Check the status of your lifter and adjust the vacuum levels right on the lifter. The integrated vacuum sensor sends information about an item's position to your controller, as well as triggers LED status indicators that show whether the arm is picking it up or releasing it. These lifters have near-field communication (NFC), so you can use a smartphone to read data, instructions, and error messages when you’re near the arm. Lifters don’t have pinch points or sharp edges, so you can use them on robots that will be near people. They help you meet ISO/TS 15066 international safety standards. Rated IP40, they're protected from wires and other objects 1 mm or larger. They're configured to work with specific robot arms, so choose the kit that matches your arm's manufacturer and model.
Use standard vacuum lifter kits to move small- and medium-sized items with curves, angles, and varied heights. They share information with your controller using both discrete I/O and IO-link communication. Discrete I/O communication is a wired connection between the lifter and the controller, while IO-link connects to an IO-link controller, which can communicate remotely over multiple networks. This remote connection shares more data than discrete I/O, so you can monitor energy use and predict when you'll need maintenance. Swap out or change the configuration using the parts listed here.
O'all | Flat Cup | Single-Bellow Cup | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| For Robot Arm Manufacturer (Series/Model No.) | Cap. @ Vacuum | Max. Vacuum, in. of Hg | Dia., mm | Ht., mm | Wt. | For Surface Type | For Use With | Cup Dia., mm | Cup Ht., mm | For Surface Type | For Use With | Cup Dia., mm | Cup Ht., mm | Each | |
Standard Vacuum Lifter Kits with LED Display—Schmalz ECBPi Series | |||||||||||||||
8-Pole Micro M12 Plug—24V DC | |||||||||||||||
| KUKA Robotics (iiwa 7, 14) | 22 lbs. @ 17 in. of Hg | 17 | 151.5 | 188.8 | 2.6 lbs./ 1.18 kg | Curved Flat | Cardboard Metal Plastic | 42 | 15 | Angled Curved Flat | Cardboard Metal Plastic | 42 | 30 | 0000000 | 000000000 |
Robot tool mounts attach lifters to your robot's wrist. Some have standard ISO mounting patterns that match the patterns on most robot arms. If you don't see your robot model number listed, measure the bolt circle diameter to determine mounting compatibility.
| For Robot Arm Manufacturer (Series/Model No.) | Bolt Circle Dia, mm | Mounting Hole Pattern Compatibility | Bolt Hole Dia., mm | No. of Bolt Holes | Mounting Fasteners Included | Dia., mm | Ht., mm | Wt. | Each | |
For Schmalz ECBPi Series | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
Aluminum | ||||||||||
| Doosan (M0609, M0617, M1013, M1509) FANUC (CRX 10iA, 10iA/L) KUKA Robotics (iiwa 7, 14) Universal Robots (UR3; UR3e; UR5; UR5e; UR10; UR10e; UR16; UR16e) | 50 | ISO 50 | 6.6 | 4 | No | 63.5 | 18 | 0.18 lbs. / 0.08 kg | 00000000 | 0000000 |