




























Electric Grippers
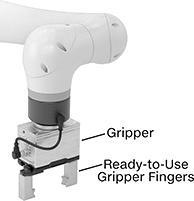
Lift and move items with electricity—no need for an air supply or complicated control valves. These grippers have a servomotor that opens and closes the jaws in a parallel motion, like elevator doors, with a consistent gripping force in either direction. This lets you grab parts from the outside or open the jaws inside hollow parts to grab them when the outside is hard to grip. Adjust the gripping force with the switch on the side. Open and close these grippers with digital signals from your controller. You’ll also need gripper fingers—choose ready-to-use fingers (sold separately) or machine your own to grip complex shapes.



EGP grippers use one connector for both power and control. If you want to signal your control program whether the jaws are open or closed, add a sensor (sold separately).
PGN-Plus E grippers include a built-in sensor to signal your control program whether the jaws are open or closed. For more detailed feedback about jaw positions, add a sensor (sold separately).
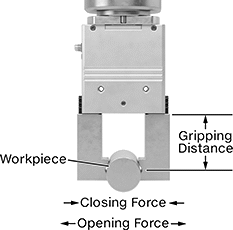
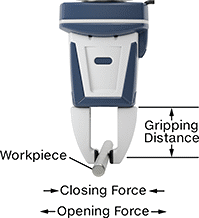
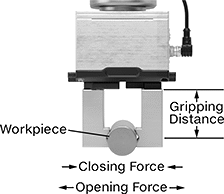
Closing force and opening force describe how hard the gripper can squeeze your part at the fingertips, also called the gripping distance. The less friction there is between the part and fingers, the more force you’ll need to lift a part. Typically, you’ll need a force that’s about 10 times the part’s weight, but an oily part might need a force about 20 times its weight. However, finger length also affects the ideal force. Click on a part number and select "Product Detail" to view a chart that shows how closing or opening force changes as the gripping distance changes.
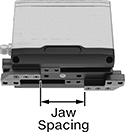
Jaw spacing describes the distance between the jaws when fully closed and fully open. It’s measured from the inside surface of the jaws.
Opening/Closing Force @ Gripping Distance | O'all | Gripper Electrical Connection | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Max. | Min. | Stroke per Jaw, mm | Jaw Spacing, mm | Max. Cycles per Second | Lg., mm | Wd., mm | Dp., mm | Plug Type | Coding | No. of | Voltage | Mounting Hardware Included | Manufacturer (Series/Model No.) | Each | |
| 8.9 lbs. @ 0 mm | 4.4 lbs. @ 32 mm | 3 | 11-17 | 5 | 72.7 | 26.5 | 18 | 4-Pole Nano M8 | A | 1 | 24V DC | No | Schunk (EGP 25) | 9604N11 | 000000000 |
| 31 lbs. @ 0 mm | 7.8 lbs. @ 50 mm | 6 | 16-28 | 2 | 88.4 | 40 | 26 | 4-Pole Nano M8 | A | 1 | 24V DC | No | Schunk (EGP 40) | 9604N12 | 00000000 |
| 47 lbs. @ 0 mm | 12.1 lbs. @ 64 mm | 8 | 18-34 | 2 | 104.4 | 50 | 30 | 4-Pole Nano M8 | A | 1 | 24V DC | No | Schunk (EGP 50) | 9604N13 | 00000000 |
| 67 lbs. @ 0 mm | 16.8 lbs. @ 64 mm | 10 | 24-44 | 1 | 114.7 | 64 | 35 | 4-Pole Nano M8 | A | 1 | 24V DC | No | Schunk (EGP 64) | 9604N14 | 00000000 |
| 120 lbs. @ 0 mm | 24.2 lbs. @ 125 mm | 8 | 11-27 | 1 | 103 | 96 | 42 | 4-Pole Nano M8 | A | 2 | 24V DC | No | Schunk (PGN-Plus E 80) | 9604N15 | 00000000 |
| 185 lbs. @ 0 mm | 44 lbs. @ 160 mm | 10 | 10.5-34.5 | 1 | 123 | 120 | 50 | 4-Pole Nano M8 | A | 2 | 24V DC | No | Schunk (PGN-Plus E 100) | 9604N16 | 00000000 |
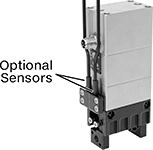
These sensors detect when the jaws reach positions—such as fully open—so your system can trigger actions such as a new pick cycle. These sensors slide into the grooves on the gripper body.
Schunk EGP series sensors are inductive, so they’re not the best choice for machining because metallic debris can trigger them.
Sensors with two sensing positions let you check more than one condition in a cycle for more reliable feedback. For example, if the sensor detects the jaws have moved past a certain position but aren’t fully closed, it may indicate the gripper missed picking up a part and signal the robot to try the pick again.
| For Manufacturer (Series) | Connection Type | No. of Wire Leads | No. of Sensing Positions | Switch Starting Position | Voltage | Current, mA | Cord Lg., ft. | Manufacturer (Model No.) | Each | |
NPN | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Schunk (JGP, JGP-P, JGZ, PGN-Plus E, PWG-Plus) | 3-Pole Nano M8 | __ | 1 | 1 Off (Normally Open) | 24V DC | 50 | 1 | Schunk (MMS 22‐S‐M8‐NPN) | 7705N141 | 0000000 |
| Schunk (JGP, JGP-P, JGZ, PGN-Plus E, PWG-Plus) | Wire Leads | 3 | 1 | 1 Off (Normally Open) | 24V DC | 50 | 6 1/2 | Schunk (MMSK 22-S-NPN) | 7705N143 | 000000 |
PNP | ||||||||||
| Schunk (JGP, JGP-P, JGZ, PGN-Plus E, PWG-Plus) | 3-Pole Nano M8 | __ | 1 | 1 Off (Normally Open) | 24V DC | 50 | 1 | Schunk (MMS 22-S-M8-PNP) | 7705N14 | 00000 |
| Schunk (JGP, JGP-P, JGZ, PGN-Plus E, PWG-Plus) | 4-Pole Nano M8 | __ | 2 | 1 Off (Normally Open) and 1 On (Normally Closed) | 24V DC | 100 | 2 | Schunk (MMS-P 22-S-M8-PNP) | 7705N148 | 000000 |
| Schunk (JGP, JGP-P, JGZ, PGN-Plus E, PWG-Plus) | Wire Leads | 3 | 1 | 1 Off (Normally Open) | 24V DC | 50 | 6 1/2 | Schunk (MMSK 22-S-PNP) | 7705N142 | 00000 |
| Schunk (JGP, JGP-P, JGZ, PGN-Plus E, PWG-Plus) | Wire Leads | 4 | 2 | 1 Off (Normally Open) and 1 On (Normally Closed) | 24V DC | 100 | 6 1/2 | Schunk (MMSK-P 22-S-PNP) | 7705N149 | 000000 |
| Schunk (EGP) | 3-Pole Nano M8 | __ | 1 | 1 Off (Normally Open) | 24V DC | 200 | 1 | Schunk (IN 40-S-M8) | 7705N144 | 000000 |
| Schunk (EGP) | 3-Pole Nano M8 | __ | 1 | 1 On (Normally Closed) | 24V DC | 200 | 1 | Schunk (IN 40-O-M8) | 7705N146 | 000000 |
| Schunk (EGP) | Wire Leads | 3 | 1 | 1 Off (Normally Open) | 24V DC | 200 | 6 1/2 | Schunk (INK 40-S) | 7705N145 | 000000 |
| Schunk (EGP) | Wire Leads | 3 | 1 | 1 On (Normally Closed) | 24V DC | 200 | 6 1/2 | Schunk (INK 40-O) | 7705N147 | 000000 |
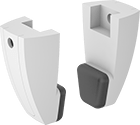

No need to machine your own fingers—connect these fingers to your gripper (sold separately) and start moving items. They’re best for parts with basic shapes—think flat edges and simple curves.
Nylon fingers have rubber gripping pads to protect your parts from damage.
Aluminum fingers have machined grooves that grip flat surfaces or curves.
Finger | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| For Manufacturer (Series/Model No.) | For Part Wd., mm | Lg., mm | Wd., mm | Dp., mm | Finger Material | Mounting Hardware Included | Features | Pair | |
| Schunk (Co-act EGP-C 40, EGP 40) | 0-12 | 50 | 25.5 | 30 | Nylon Plastic | Yes | Rubber Gripping Pad | 9799N13 | 0000000 |
| Schunk (Co-act EGP-C 40, EGP 40) | 12-24 | 50 | 19.5 | 30 | Nylon Plastic | Yes | Rubber Gripping Pad | 9799N14 | 000000 |
| Schunk (Co-act EGP-C 64, EGP 64) | 0-20 | 80 | 39 | 36.9 | Nylon Plastic | Yes | Rubber Gripping Pad | 9799N7 | 000000 |
| Schunk (Co-act EGP-C 64, EGP 64) | 20-40 | 80 | 29 | 34 | Nylon Plastic | Yes | Rubber Gripping Pad | 9799N18 | 000000 |
| Schunk (PGN-Plus E 80) | 9.5-25.5 | 77.5 | 36 | 25 | Aluminum | Yes | __ | 9799N22 | 000000 |
| Schunk (PGN-Plus E 100) | 12.5-32.5 | 95 | 44 | 30 | Aluminum | Yes | __ | 9799N23 | 000000 |
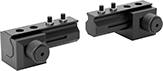

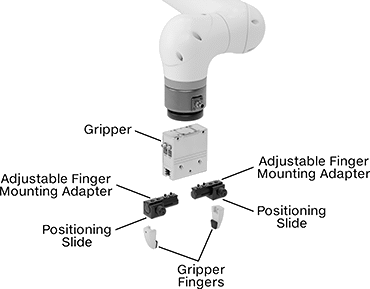
Increase the range of part sizes your gripper can handle. Each pair of adapters has a jaw mount and a positioning slide that moves along a rail. Connect your fingers to the slides, use the scale on the rail to precisely position them, and tighten the thumb screws to secure them in place.
Keep multiple sets of positioning slides (sold separately) on hand to speed up your gripper finger changes.
| For Manufacturer (Series/Model No.) | Positioning Slide Adjustment Wd., mm | Adjustment Increments, mm | Lg., mm | Wd., mm | Ht., mm | Mounting Hardware Included | Material | Manufacturer (Series/Model No.) | Wt. | Pair | |
| Schunk (PGN-Plus E 80) | 44 | 2 | 79 | 42 | 40 | Yes | Aluminum | Schunk (UZB 80) | 0.74 lbs. / 0.34 kg | 9604N21 | 0000000 |
| Schunk (PGN-Plus E 100) | 55 | 2.5 | 97 | 47 | 46 | Yes | Aluminum | Schunk (UZB 100) | 1.14 lbs. / 0.52 kg | 9604N22 | 000000 |
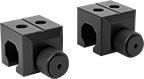
When you need to frequently swap your gripper fingers for different jobs, attach a pair of these slides to each of your finger sets to speed up the process. You’ll also need an adjustable finger mounting adapter (sold separately).
Robot-Ready Collaborative Electric Grippers


Work safely alongside collaborative robots as they perform machine tending, packaging, and assembly tasks. These grippers help you meet ISO/TS 15066 standards thanks to their built-in safety features—they limit gripping force to safe levels and have a plastic housing that protects you from pinch points and sharp edges in case of a collision.
Electrically powered and controlled entirely by your robot, these grippers don’t need a compressed air supply or complicated air control valves. A servomotor opens and closes the jaws like elevator doors with a consistent gripping force in either direction. This lets you grab parts from the outside or open the jaws inside hollow parts to grab them when the outside is hard to grip. Use a switch on the side to set the force. These grippers also have a built-in sensor that your robot can use to confirm that a part has been picked up.
They come with a robot tool mount, electrical connections, and software plug-ins tailored for FANUC CRX and Universal Robots (UR) arms. You’ll also need gripper fingers—choose ready-to-use fingers (sold separately) or machine your own to grip complex shapes.


FANUC-approved or UR+ certified, all grippers have been tested to work seamlessly with your robot. Once you attach the gripper to your robot, download the software plug-in and install it on your robot teach pendant. This allows you to use your teach pendant to open and close the grippers.
Grippers come with a short electrical cord that connects to the end of your robot arm.
Grippers with an LED status ring can be programmed from your teach pendant to display one of three colors based on the gripper’s status. For example, display a green light if the gripper has picked up an item, yellow after releasing an item, and red if a pickup has failed. They include a 4 meter electrical cord with wire leads that connect to the terminals on your robot controller.
Closing force and opening force describe how hard the gripper can squeeze your part at the fingertips, also called the gripping distance. The less friction there is between the part and fingers, the more force you’ll need to lift a part. Typically, you’ll need a force that’s about 10 times the part’s weight, but an oily part might need a force about 20 times its weight. However, finger length also affects the ideal force. Click on a part number and select "Product Detail" to view a chart that shows how closing or opening force changes as the gripping distance changes.
Jaw spacing describes the distance between the jaws when fully closed and fully open. It’s measured from the inside surface of the jaws.
Opening/Closing Force @ Gripping Distance | O'all | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| For Robot Arm Manufacturer (Series/Model No.) | Max. | Min. | Stroke per Jaw, mm | Jaw Spacing, mm | Max. Cycles per Sec. | Lg., mm | Wd., mm | Dp., mm | Each | |
Grippers | ||||||||||
| FANUC (CRX 5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) | 30 lbs. @ 0 mm | 8.1 lbs. @ 50 mm | 6 | 16-28 | 1 | 118 | 93 | 90 | 3767N33 | 000000000 |
| FANUC (CRX 5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) | 51 lbs. @ 0 mm | 12.3 lbs. @ 80 mm | 10 | 24-44 | 1 | 144 | 125 | 86 | 3767N34 | 00000000 |
| Universal Robots (UR3e; UR5e; UR7e; UR10e; UR12e; UR16e) | 30 lbs. @ 0 mm | 8.1 lbs. @ 50 mm | 6 | 16-28 | 1 | 118 | 93 | 90 | 3767N11 | 00000000 |
| Universal Robots (UR3e; UR5e; UR7e; UR10e; UR12e; UR16e) | 51 lbs. @ 0 mm | 12.3 lbs. @ 80 mm | 10 | 24-44 | 1 | 144 | 125 | 86 | 9599N13 | 00000000 |
Grippers with LED Status Ring | ||||||||||
| FANUC (CRX 5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) | 30 lbs. @ 0 mm | 8.1 lbs. @ 50 mm | 6 | 16-28 | 1 | 118 | 93 | 90 | 9599N11 | 00000000 |
| FANUC (CRX 5iA, 10iA, 10iA/L, 20iA/L, 25iA, 30iA) | 51 lbs. @ 0 mm | 12.3 lbs. @ 80 mm | 10 | 24-44 | 1 | 144 | 125 | 86 | 9599N12 | 00000000 |
| Universal Robots (UR3e; UR5e; UR7e; UR10e; UR12e; UR16e) | 30 lbs. @ 0 mm | 8.1 lbs. @ 50 mm | 6 | 16-28 | 1 | 118 | 93 | 90 | 3767N18 | 00000000 |
| Universal Robots (UR3e; UR5e; UR7e; UR10e; UR12e; UR16e) | 51 lbs. @ 0 mm | 12.3 lbs. @ 80 mm | 10 | 24-44 | 1 | 144 | 125 | 86 | 3767N21 | 00000000 |

No need to machine your own fingers—connect these fingers to your gripper (sold separately) and start moving items. They’re best for parts with basic shapes—think flat edges and simple curves. Rubber gripping pads protect your parts from damage.
Finger | ||||||||
|---|---|---|---|---|---|---|---|---|
| For Part Width Range, mm | Lg., mm | Wd., mm | Dp., mm | Finger Material | Gripping Pad Material | Mounting Hardware Included | Pair | |
For 6 mm Stroke per Jaw | ||||||||
| 0-12 | 50 | 25.5 | 30 | Nylon Plastic | Rubber | Yes | 9541N11 | 0000000 |
| 12-24 | 50 | 19.5 | 30 | Nylon Plastic | Rubber | Yes | 9541N12 | 000000 |
For 10 mm Stroke per Jaw | ||||||||
| 0-20 | 80 | 39 | 36.9 | Nylon Plastic | Rubber | Yes | 9599N14 | 000000 |
| 20-40 | 80 | 29 | 34 | Nylon Plastic | Rubber | Yes | 9599N15 | 000000 |
Robot-Ready Electric Soft Grippers


Mimicking a human hand, these grippers have soft, flexible silicone fingers that curl around items to pick them up. Unlike standard grippers with rigid fingers, these grippers can grasp fruit, bagged items, and other delicate objects without crushing them. They are powered and actuated entirely by your robot, so there's no need for an air supply or control valves. Connect them to terminals on your robot controller with the included 9 1/2 ft. electrical cord. A simple toggle on your controller’s digital outputs opens and closes the fingers. Mount them to most robot arms, like FANUC CRX and Universal Robots arms, thanks to their mounting slots that match a variety of ISO mounting patterns.
To program their range of motion and position, you’ll have access to a simple web-based interface from any smartphone or laptop. You don’t have to worry about hooking these up to your network. They generate their own wireless network like a hotspot, so you can connect your device to the setup interface to program them. If you are using these grippers with a Universal Robots arm, you can download a URCap plugin from the manufacturer's website for user-friendly control through your teach pendant software.
The fingers are made of FDA-compliant silicone for direct contact with food.
Grippers with fixed grip force apply the same amount of force every time. This helps them pick up most items successfully.
Grippers with adjustable grip force are the best choice to grip extremely sensitive items, such as baked goods or fragile glassware, because you can fine-tune the gripping force. These grippers also have part confirmation, which means they can send a signal to one of your robot controller's digital inputs to tell it whether a part has been successfully picked up. If the pickup fails, you can program your robot to try the pickup again.
2-finger grippers are good at picking up objects with uniform shapes, such as bottles and boxes.
4-finger grippers are a good choice if you plan to pick up irregularly shaped objects and need additional points of contact for a secure hold. They work well with fruits and vegetables, fabrics, and flexible packaging.
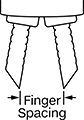
Finger covers (sold separately) protect the gripper fingers from residue left from the material you're picking. These silicone covers slide over the fingers for picking and slide off for cleaning. They are FDA compliant for direct contact with food.
Finger spacing range describes the distance between the fingers across their full range of motion, from pressed together to stretched open. It’s measured from the inside surface of the fingers.
O'all | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Finger Configuration | External Gripping Force, lbs. | Max. Gripping Cap. | Max. Cycles per Sec. | Finger Spacing Range, mm | Mounting Hole Pattern Compatibility | Dia., mm | Lg., mm | Each | |
Aluminum Housing and Silicone Rubber Fingers | |||||||||
| 2-Finger | 1.1 | 3.3 lbs. / 1.5 kg | 1 | 0-175 | ISO 31.5 ISO 40 ISO 50 ISO 63 | 105 | 172 | 7149N101 | 000000000 |
| 4-Finger | 1.1 | 3.3 lbs. / 1.5 kg | 1 | 0-190 | ISO 31.5 ISO 40 ISO 50 ISO 63 | 119 | 187 | 7149N103 | 00000000 |
O'all | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Finger Configuration | External Gripping Force Range, lbs. | Max. Gripping Cap. | Max. Cycles per Sec. | Finger Spacing Range, mm | Mounting Hole Pattern Compatibility | Dia., mm | Lg., mm | Each | |
Aluminum Housing and Silicone Rubber Fingers | |||||||||
| 2-Finger | 0.23-1.1 | 3.3 lbs. / 1.5 kg | 1 | 0-175 | ISO 31.5 ISO 40 ISO 50 ISO 63 | 105 | 172 | 7149N102 | 000000000 |
| 4-Finger | 0.23-1.1 | 3.3 lbs. / 1.5 kg | 1 | 0-190 | ISO 31.5 ISO 40 ISO 50 ISO 63 | 119 | 187 | 7149N104 | 00000000 |
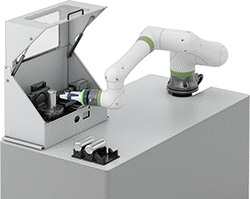
Robot-Ready Electric Grippers
Equip your robot arm with all it needs to lift and move items using electricity—no air supply or complicated control valves needed. These grippers have a servomotor that opens and closes the jaws in a parallel motion, like elevator doors, with a consistent gripping force in either direction. This lets you grab parts from the outside or open the jaws inside hollow parts to grab them when the outside is hard to grip. These grippers open and close wider and with more force than our collaborative robot-ready electric grippers to handle heavier and larger items. This makes them a good match for packaging, assembly, and machine-tending jobs. Use your robot’s control program to set the gripping force and jaw position. A built-in sensor detects when the part is picked up, so your arm knows it can move to the next location.
These grippers include a robot mount, electrical connections, and software plug-ins tailored to FANUC CRX and Universal Robots (UR) arms. You’ll also need gripper fingers—choose ready-to-use fingers (sold separately) or machine your own to grip complex shapes.
Unlike collaborative robot-ready grippers, these grippers can operate at high forces. They may require additional safety precautions when working near your collaborative robot.

Grippers connect to your robot’s teach pendant using the software plug-in. Then you can use your teach pendant to open and close the grippers.
The IP67-rated control box of these grippers shields the electrical components from coolant. Plus, their jaws are rated IP40, so solid objects, such as chips produced during machining, won’t obstruct their motion.
Choose a single gripper for simple pick-and-place operations. It holds one part at a time.
Dual grippers can help reduce cycle times by handling two parts at once. For example, you might use one gripper to unload a part from your machine, then rotate the robot arm and use the second gripper to load a new part.
Closing force and opening force describe how hard the gripper can squeeze your part at the fingertips, also called the gripping distance. The less friction there is between the part and fingers, the more force you’ll need to lift a part. Typically, you’ll need a force that’s about 10 times the part’s weight, but an oily part might need a force about 20 times its weight. However, finger length also affects the ideal force. Click on a part number and select "Product Detail" to view a chart that shows how closing or opening force changes as the gripping distance changes.
Jaw spacing describes the distance between the jaws when fully closed and fully open. It’s measured from the inside surface of the jaws.
Opening/Closing Force @ Gripping Distance | O'all | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| For Robot Arm Manufacturer (Series/Model No.) | Max. | Min. | Stroke per Jaw, mm | Jaw Spacing, mm | Max. Cycles per Sec. | Lg., mm | Wd., mm | Dp., mm | Each | |
Single Gripper | ||||||||||
| FANUC (CRX 5iA, 10iA, 10iA/L, 20iA, 20iA/L, 25iA, 30iA) Universal Robots (UR5e; UR7e; UR10e; UR12e; UR16e) | 146 lbs. @ 0 mm | 33 lbs. @ 80 mm | 51 | 1-103 | 0.6 | 103 | 149 | 72 | 9495N21 | 000000000 |
Dual Gripper | ||||||||||
| FANUC (CRX 5iA, 10iA, 10iA/L, 20iA, 20iA/L, 25iA, 30iA) Universal Robots (UR5e; UR7e; UR10e; UR12e; UR16e) | 146 lbs. @ 0 mm | 33 lbs. @ 80 mm | 51 | 1-103 | 0.6 | 176 | 347 | 72 | 9495N22 | 00000000 |
No need to machine your own fingers—connect these fingers to your gripper (sold separately) and start moving items. They’re best for parts with basic shapes—think flat edges and simple curves.
Finger | |||||||
|---|---|---|---|---|---|---|---|
| For Part Wd. Range, mm | Lg., mm | Wd., mm | Dp., mm | Finger Material | Mounting Hardware Included | Pair | |
| 0-88 | 59 | 30.5 | 20 | Aluminum | Yes | 9495N17 | 0000000 |