Angular Air-Powered Grippers
Shave seconds off every pick-and-place cycle. Unlike parallel grippers that must retract before clearing a part, these grippers have jaws that swing up and out of the way to release parts instantly. This means they also work well in tight spaces. Connect them to your compressed air system and add gripper fingers (not included).
Single-acting grippers use air pressure to close the jaws and an internal spring to open them when airflow stops. They cost less to run than double-acting grippers because they use less air.
Double-acting grippers use air pressure to open and close the jaws for consistent gripping force in either direction. This lets you grab parts from the outside or open the jaws inside hollow parts to grab them when the outside is hard to grip. These grippers deliver a bit more closing force than single-acting grippers of the same size. They also give you better control over how quickly the jaws open, especially when paired with long, heavy fingers.
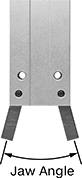
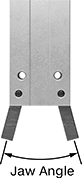
Choose grippers with a 180° open jaw angle when you need the jaws to be completely out of the way after dropping a part. They’re often used to pick and place items on a conveyor where the jaws would otherwise block the items’ path.
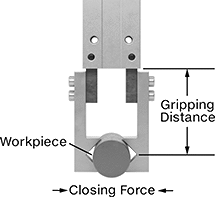
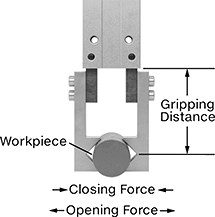
Closing force and opening force describe how hard the gripper can squeeze your part at the fingertips, also called the gripping distance. The less friction there is between the part and fingers, the more force you’ll need to lift a part. Typically, you’ll need a force that’s about 10 times the part’s weight, but an oily part might need a force about 20 times its weight. However, air pressure and finger length also affect the ideal force. Click on a part number and select "Product Detail" to view a chart that shows how closing or opening force changes as the gripping distance changes.

Closing Force @ Gripping Distance | O'all | Air Inlet | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Max. | Min. | Closed Jaw Angle | Operating Pressure, psi | Lg., mm | Wd., mm | Dp., mm | Thread Size | Thread Type | Manufacturer (Series/Model No.) | Each | |
20° Open Jaw Angle | |||||||||||
| 0.35 lbs. @ 15 mm | 0.08 lbs. @ 30 mm | -7° | 59-87 | 23 | 15 | 10 | M3 × 0.5 mm | Metric | SMC (MHCM2 7S) | 6220K87 | 000000 |
30° Open Jaw Angle | |||||||||||
| 0.67 lbs. @ 10 mm | 0.11 lbs. @ 30 mm | -10° | 44-87 | 36 | 20 | 10 | M3 × 0.5 mm | Metric | SMC (MHC2 6S) | 6220K88 | 00000 |
| 3.8 lbs. @ 5 mm | 0.44 lbs. @ 28 mm | -10° | 37-87 | 53 | 23 | 17 | M3 × 0.5 mm | Metric | SMC (MHC2 10S) | 6220K51 | 000000 |
| 10.7 lbs. @ 8 mm | 0.89 lbs. @ 40 mm | -10° | 37-87 | 62 | 30 | 24 | M5 × 0.8 mm | Metric | SMC (MHC2 16S) | 6220K52 | 000000 |
| 15.7 lbs. @ 10 mm | 1.1 lbs. @ 60 mm | -10° | 37-87 | 79 | 42 | 28 | M5 × 0.8 mm | Metric | SMC (MHC2 20S) | 6220K53 | 000000 |
| 24.7 lbs. @ 12 mm | 1.7 lbs. @ 80 mm | -10° | 37-87 | 93 | 52 | 34 | M5 × 0.8 mm | Metric | SMC (MHC2 25S) | 6220K54 | 000000 |

Closing Force @ Gripping Distance | Opening Force @ Gripping Distance | O'all | Air Inlet | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Max. | Min. | Max. | Min. | Closed Jaw Angle | Operating Pressure, psi | Lg., mm | Wd., mm | Dp., mm | Air Inlet Pipe Size | Thread Size | Thread Type | Manufacturer (Series/Model No.) | Each | |
30° Open Jaw Angle | ||||||||||||||
| 0.89 lbs. @ 10 mm | 0.16 lbs. @ 30 mm | 0.89 lbs. @ 10 mm | 0.16 lbs. @ 30 mm | -10° | 22-87 | 36 | 20 | 10 | __ | M3 × 0.5 mm | Metric | SMC (MHC2 6D) | 6220K89 | 000000 |
| 5.1 lbs. @ 5 mm | 0.67 lbs. @ 30 mm | 5.1 lbs. @ 5 mm | 0.67 lbs. @ 30 mm | -10° | 15-87 | 53 | 23 | 17 | __ | M3 × 0.5 mm | Metric | SMC (MHC2 10D) | 6220K41 | 000000 |
| 13.4 lbs. @ 7 mm | 1.1 lbs. @ 40 mm | 13.4 lbs. @ 7 mm | 1.1 lbs. @ 40 mm | -10° | 15-87 | 62 | 30 | 24 | __ | M5 × 0.8 mm | Metric | SMC (MHC2 16D) | 6220K42 | 000000 |
| 18.6 lbs. @ 10 mm | 1.1 lbs. @ 60 mm | 18.6 lbs. @ 10 mm | 1.1 lbs. @ 60 mm | -10° | 15-87 | 79 | 42 | 28 | __ | M5 × 0.8 mm | Metric | SMC (MHC2 20D) | 6220K43 | 000000 |
| 28 lbs. @ 12 mm | 2.2 lbs. @ 80 mm | 28 lbs. @ 12 mm | 2.2 lbs. @ 80 mm | -10° | 15-87 | 93 | 52 | 34 | __ | M5 × 0.8 mm | Metric | SMC (MHC2 25D) | 6220K44 | 000000 |
| 33 lbs. @ 10 mm | 8.9 lbs. @ 90 mm | 33 lbs. @ 10 mm | 8.9 lbs. @ 90 mm | -6° | 29-116 | 38.5 | 56 | 30 | __ | M5 × 0.8 mm | Metric | Schunk (PWG-Plus 50) | 6220K74 | 000000 |
| 44 lbs. @ 20 mm | 8.9 lbs. @ 120 mm | 44 lbs. @ 20 mm | 8.9 lbs. @ 120 mm | -6° | 29-116 | 45 | 67 | 36 | __ | M5 × 0.8 mm | Metric | Schunk (PWG-Plus 64) | 6220K75 | 000000 |
| 67 lbs. @ 20 mm | 22.4 lbs. @ 150 mm | 67 lbs. @ 20 mm | 22.4 lbs. @ 150 mm | -6° | 29-116 | 53.5 | 80 | 42 | __ | M5 × 0.8 mm | Metric | Schunk (PWG-Plus 80) | 6220K76 | 000000 |
| 145 lbs. @ 20 mm | 22.4 lbs. @ 180 mm | 145 lbs. @ 20 mm | 22.4 lbs. @ 180 mm | -6° | 29-116 | 65 | 100 | 50 | 1/8 | __ | BSPP | Schunk (PWG-Plus 100) | 6220K77 | 000000 |
| 400 lbs. @ 20 mm | 44 lbs. @ 240 mm | 400 lbs. @ 20 mm | 44 lbs. @ 240 mm | -6° | 29-116 | 80 | 125 | 60 | 1/8 | __ | BSPP | Schunk (PWG-Plus 125) | 6220K78 | 00000000 |
| 425 lbs. @ 20 mm | 89 lbs. @ 300 mm | 425 lbs. @ 20 mm | 89 lbs. @ 300 mm | -6° | 29-116 | 88 | 152 | 72 | 1/8 | __ | BSPP | Schunk (PWG-Plus 160) | 6220K79 | 00000000 |
| 1,230 lbs. @ 20 mm | 134 lbs. @ 360 mm | 1,230 lbs. @ 20 mm | 134 lbs. @ 360 mm | -6° | 29-116 | 115 | 193 | 100 | 1/8 | __ | BSPP | Schunk (PWG-Plus 200) | 6220K81 | 00000000 |
| 1,910 lbs. @ 20 mm | 220 lbs. @ 450 mm | 1,910 lbs. @ 20 mm | 220 lbs. @ 450 mm | -6° | 29-116 | 134 | 236 | 115 | 1/8 | __ | BSPP | Schunk (PWG-Plus 240) | 6220K82 | 00000000 |
180° Open Jaw Angle | ||||||||||||||
| 2 lbs. @ 20 mm | 0.22 lbs. @ 60 mm | 2 lbs. @ 20 mm | 0.22 lbs. @ 60 mm | -3° | 15-87 | 58 | 30 | 15 | __ | M5 × 0.8 mm | Metric | SMC (MHY2 10D) | 6220K83 | 000000 |
| 7.1 lbs. @ 20 mm | 0.67 lbs. @ 70 mm | 7.1 lbs. @ 20 mm | 0.67 lbs. @ 70 mm | -3° | 15-87 | 69 | 38 | 20 | __ | M5 × 0.8 mm | Metric | SMC (MHY2 16D) | 6220K84 | 000000 |
| 9.4 lbs. @ 30 mm | 1.1 lbs. @ 80 mm | 9.4 lbs. @ 30 mm | 1.1 lbs. @ 80 mm | -3° | 15-87 | 86 | 48 | 26 | __ | M5 × 0.8 mm | Metric | SMC (MHY2 20D) | 6220K85 | 000000 |
| 19.5 lbs. @ 30 mm | 2.2 lbs. @ 90 mm | 19.5 lbs. @ 30 mm | 2.2 lbs. @ 90 mm | -3° | 15-87 | 107 | 58 | 30 | __ | M5 × 0.8 mm | Metric | SMC (MHY2 25D) | 6220K86 | 000000 |
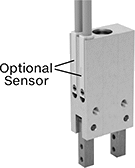
These sensors detect when the jaws reach positions—such as fully open—so your system can trigger actions such as a new pick cycle. They slide into the grooves of the gripper body.
Sensors with two sensing positions let you check more than one condition in a cycle for more reliable feedback. For example, if the sensor detects the jaws have moved past a certain position but aren’t fully closed, it may indicate the gripper missed picking up a part and signal the robot to try the pick again.
| For Manufacturer Series | Signal Output Type | Connection Type | No. of Wire Leads | No. of Sensing Positions | Switch Starting Position | Voltage | Current, mA | Cord Lg., ft. | Manufacturer (Series/Model No.) | Each | |
For SMC Grippers | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| MHC2, MHF2, MHL2, MHM, MHS3, MHY2, MHZ2 | NPN | 3-Pole Nano M8 | __ | 1 | 1 Off (Normally Open) | 24V DC | 10 | 1 1/2 | SMC (D-M9NSAPC) | 9533N24 | 000000 |
| MHC2, MHF2, MHL2, MHM, MHS3, MHY2, MHZ2 | NPN | 4-Pole Micro M12 | __ | 1 | 1 Off (Normally Open) | 24V DC | 10 | 3 | SMC (D-M9NMDPC) | 9533N22 | 00000 |
| MHC2, MHF2, MHL2, MHM, MHS3, MHY2, MHZ2 | NPN | Wire Leads | 3 | 1 | 1 Off (Normally Open) | 24V DC | 10 | 3 | SMC (D-M9NM) | 9533N19 | 00000 |
| MHC2, MHF2, MHL2, MHM, MHS3, MHY2, MHZ2 | PNP | 3-Pole Nano M8 | __ | 1 | 1 Off (Normally Open) | 24V DC | 10 | 1 1/2 | SMC (D-M9PSAPC) | 9533N25 | 00000 |
| MHC2, MHF2, MHL2, MHM, MHS3, MHY2, MHZ2 | PNP | 4-Pole Micro M12 | __ | 1 | 1 Off (Normally Open) | 24V DC | 10 | 3 | SMC (D-M9PMDPC) | 9533N23 | 00000 |
| MHC2, MHF2, MHL2, MHM, MHS3, MHY2, MHZ2 | PNP | Wire Leads | 3 | 1 | 1 Off (Normally Open) | 24V DC | 10 | 3 | SMC (D-M9PM) | 9533N21 | 00000 |
For Schunk Grippers | |||||||||||
| JGP, JGP-P, JGZ, PGN-Plus E, PWG-Plus | NPN | 3-Pole Nano M8 | __ | 1 | 1 Off (Normally Open) | 24V DC | 50 | 1 | Schunk (MMS 22‐S‐M8‐NPN) | 7705N141 | 000000 |
| JGP, JGP-P, JGZ, PGN-Plus E, PWG-Plus | NPN | Wire Leads | 3 | 1 | 1 Off (Normally Open) | 24V DC | 50 | 6 1/2 | Schunk (MMSK 22-S-NPN) | 7705N143 | 000000 |
| JGP, JGP-P, JGZ, PGN-Plus E, PWG-Plus | PNP | 3-Pole Nano M8 | __ | 1 | 1 Off (Normally Open) | 24V DC | 50 | 1 | Schunk (MMS 22-S-M8-PNP) | 7705N14 | 00000 |
| JGP, JGP-P, JGZ, PGN-Plus E, PWG-Plus | PNP | 4-Pole Nano M8 | __ | 2 | 1 Off (Normally Open) and 1 On (Normally Closed) | 24V DC | 100 | 2 | Schunk (MMS-P 22-S-M8-PNP) | 7705N148 | 000000 |
| JGP, JGP-P, JGZ, PGN-Plus E, PWG-Plus | PNP | Wire Leads | 3 | 1 | 1 Off (Normally Open) | 24V DC | 50 | 6 1/2 | Schunk (MMSK 22-S-PNP) | 7705N142 | 00000 |
| JGP, JGP-P, JGZ, PGN-Plus E, PWG-Plus | PNP | Wire Leads | 4 | 2 | 1 Off (Normally Open) and 1 On (Normally Closed) | 24V DC | 100 | 6 1/2 | Schunk (MMSK-P 22-S-PNP) | 7705N149 | 000000 |
Robot-Ready Electric Soft Grippers

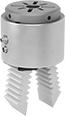

Mimicking a human hand, these grippers have soft, flexible silicone fingers that curl around items to pick them up. Unlike standard grippers with rigid fingers, these grippers can grasp fruit, bagged items, and other delicate objects without crushing them. They are powered and actuated entirely by your robot, so there's no need for an air supply or control valves. Connect them to terminals on your robot controller with the included 9 1/2 ft. electrical cord. A simple toggle on your controller’s digital outputs opens and closes the fingers. Mount them to most robot arms, like FANUC CRX and Universal Robots arms, thanks to their mounting slots that match a variety of ISO mounting patterns.
To program their range of motion and position, you’ll have access to a simple web-based interface from any smartphone or laptop. You don’t have to worry about hooking these up to your network. They generate their own wireless network like a hotspot, so you can connect your device to the setup interface to program them. If you are using these grippers with a Universal Robots arm, you can download a URCap plugin from the manufacturer's website for user-friendly control through your teach pendant software.
The fingers are made of FDA-compliant silicone for direct contact with food.
Grippers with fixed grip force apply the same amount of force every time. This helps them pick up most items successfully.
Grippers with adjustable grip force are the best choice to grip extremely sensitive items, such as baked goods or fragile glassware, because you can fine-tune the gripping force. These grippers also have part confirmation, which means they can send a signal to one of your robot controller's digital inputs to tell it whether a part has been successfully picked up. If the pickup fails, you can program your robot to try the pickup again.
2-finger grippers are good at picking up objects with uniform shapes, such as bottles and boxes.
4-finger grippers are a good choice if you plan to pick up irregularly shaped objects and need additional points of contact for a secure hold. They work well with fruits and vegetables, fabrics, and flexible packaging.
Finger covers (sold separately) protect the gripper fingers from residue left from the material you're picking. These silicone covers slide over the fingers for picking and slide off for cleaning. They are FDA compliant for direct contact with food.
Finger spacing range describes the distance between the fingers across their full range of motion, from pressed together to stretched open. It’s measured from the inside surface of the fingers.
O'all | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Finger Configuration | External Gripping Force, lbs. | Max. Gripping Cap. | Max. Cycles per Sec. | Finger Spacing Range, mm | Mounting Hole Pattern Compatibility | Dia., mm | Lg., mm | Each | |
Aluminum Housing and Silicone Rubber Fingers | |||||||||
| 2-Finger | 1.1 | 3.3 lbs. / 1.5 kg | 1 | 0-175 | ISO 31.5 ISO 40 ISO 50 ISO 63 | 105 | 172 | 7149N101 | 000000000 |
| 4-Finger | 1.1 | 3.3 lbs. / 1.5 kg | 1 | 0-190 | ISO 31.5 ISO 40 ISO 50 ISO 63 | 119 | 187 | 7149N103 | 00000000 |
O'all | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Finger Configuration | External Gripping Force Range, lbs. | Max. Gripping Cap. | Max. Cycles per Sec. | Finger Spacing Range, mm | Mounting Hole Pattern Compatibility | Dia., mm | Lg., mm | Each | |
Aluminum Housing and Silicone Rubber Fingers | |||||||||
| 2-Finger | 0.23-1.1 | 3.3 lbs. / 1.5 kg | 1 | 0-175 | ISO 31.5 ISO 40 ISO 50 ISO 63 | 105 | 172 | 7149N102 | 000000000 |
| 4-Finger | 0.23-1.1 | 3.3 lbs. / 1.5 kg | 1 | 0-190 | ISO 31.5 ISO 40 ISO 50 ISO 63 | 119 | 187 | 7149N104 | 00000000 |